Покрытие, связность и плотность в двумерных и трехмерных беспроводных сенсорных сетях
покрытие, связность и плотность в двумерных и трехмерных
беспроводных сенсорных сетях
Шапаев
А.В.
Несмотря на то, что большинство существующих
работ в области беспроводных сенсорных сетей (БСС) в настоящее время посвящены
двумерному пространству (2D), на самом деле такие сети работают в трехмерном
пространстве (3D), особенно с учетом появления новых приложений, таких как
летающие сенсорные сети.
Переход от двумерного к трехмерному пространству
порождает множество новых проблем в связи с иной топологией сети. Требуются
новые подходы к оценке таких характеристик БСС как покрытие, связность и
плотность.
Исходя из сказанного, в настоящей главе мы
фокусируем внимание на характеристиках плотности и связности для БСС с целью
определения такой стратегии размещения сенсорных узлов, чтобы возможно было
обеспечить, по крайней мере, 90% покрытие для двумерных (2D) и трехмерных(3D)
БСС. При этом оцениваются также длительность жизненного цикла сети, период
стабильности и пропускная способность сети на основе отношения между радиусом
покрытия и радиусом дальности связи. Результаты могут быть использованы при
планировании как БСС, размещенных на плоскости, в трехмерном пространстве, так
и летающих сенсорных сетей.
В последние годы исследования в области БСС постепенно
переходят от изучения характеристик на плоскости к моделям в трехмерном (3D)
пространстве.
В предлагается новая область применения
технологий БСС - летающие сенсорные сети (ЛСС). Примерами приложений БСС в
трехмерном пространстве помимо ЛСС может быть мониторинг многоэтажных зданий,
складских помещений, подводный мониторинг и т.п.
Переход от моделей двумерного пространства к
трехмерному далеко не прост, так как решение многих проблем в 3D значительно
сложнее, чем в 2D.
Топология сети становится существенно сложнее,
что непосредственно сказывается на планировании 3D БСС.
При планировании БСС существует множество
взаимоувязанных показателей, оказывающих решающее воздействие на последующее
функционирование сети. В первую очередь к ним относятся: стратегия размещения
сенсорных узлов в трехмерном пространстве (детерминированная или случайная),
плотность размещения сенсорных узлов, зона покрытия, качество связи, отношение
между радиусом покрытия и дальностью связи. Увеличение зоны покрытия является
фундаментальным требованием для большинства приложений сенсорных сетей,
например, мониторинга [ 87], управления, слежения за целью.
На рисунке 1 представлено изображение сенсорных
сетей в двумерном и трехмерном пространстве.
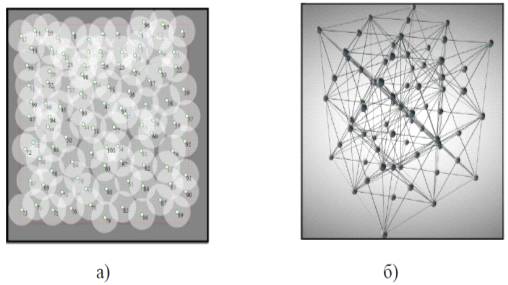
Рисунок 1 - БСС в двумерном и трехмерном
пространствах:- БСС в 2D; б - БСС в 3D
Заметим, что трехмерная сеть может быть
представлена с помощью множества двумерных (см. Рисунок. 2). Каждое трехмерное
пространство может быть разделено на n двумерных плоскостей, где n →∞.

Рисунок 2 - Трехмерная сеть включает двумерные
сети
трехмерный пространство сеть
покрытие
Двумерная БСС
Предположим, что сенсорных узлов случайным
образом распределены в 2D плоскости и зона покрытия сенсорного узла
представляет собой диск с радиусом Rs, площадь которого:


Для достижения желаемой целевой зоны покрытия С
(0,9≤ ≤1) при ≥0,99......0,90 ⇔
≥4,6......2,3 соответственно, необходимые плотности сенсорных узлов могут
быть определены следующим образом:
=0,98 ⇔
ρS
≥
391; c=0,97 ⇔ ρS ≥
3,50;=0,96 ⇔ ρS ≥
3,21; c=0,95 ⇔ ρS ≥
2,99;=0,94 ⇔ ρS ≥
2,81; c=0,93 ⇔ ρS ≥
2,66;=0,92 ⇔ ρS ≥
2,53; c=0,91 ⇔ ρS ≥
2,41;=0,90 ⇔ ρS ≥ 2,30.
В общем случае требуемая плотность БСС:

На рисунке 3 показаны соотношения между радиусом
покрытия, долей покрытия и плотностью размещения сенсорных узлов в 2D БСС для
получения заданной доли покрытия.
Таблица 1 - Соотношения между радиусом покрытия,
долей покрытия C и плотностью в 2D БСС

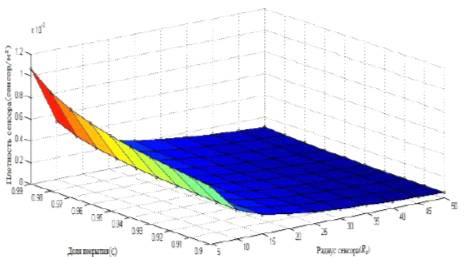
Рисунок 3 - Соотношения между радиусом покрытия 𝑅𝑠,
долей покрытия C и плотностью в 2D БСС