Широтно-импульсные преобразователи
Введение
преобразователь импульсный силовой
В основных задачах экономического и социального развития РФ
сказано, что в реализации стратегических задач в ближайшее время важнейшая роль
принадлежит инженерно-техническому персоналу.
Главная задача состоит в повышении темпов и эффективности
развития экономики на базе ускорения научно-технического прогресса,
технического перевооружения и реконструкции производства, интенсивного
использования созданного производственного потенциала.
Важнейшим стратегическим направлением является перевод
электротехнического производства на инновационный путь развития. Учитывая
моральное старение большей части выпускаемой продукции, необходимо разработать
и поставить на рынки новые поколения изделий электротехники, обеспечивающие переход
на новые технологии во всех отраслях реального сектора экономики, социальной
сфере и обороне страны.
Мировая практика обновления технологий производства серийной
электротехнической продукции следующая: в низковольтной аппаратуре - 1 раз в 8
лет, в электроэнергетике - 1 раз в 10 лет, в кабельной промышленности - 1 раз в
15 лет. Следует отметить, что обновление единых серий электротехнических
изделий не проводилось с 1990 года. Эта работа традиционна для предметно
специализированных научно-исследовательских подразделений электротехники.
Отличительной особенностью существующей ситуации является значительное
расширение и изменение сути маркетинговых работ, обеспечивающих формулирование
новых требований к электротехнической продукции. Если ранее эти работы выполнялись
специализированными организациями других отраслей реального сектора экономики,
то теперь это стало прерогативой производителей продукции, идет активная
переориентация разработчиков и производителей на работу в тесном контакте с
организациями - потенциальными потребителями.
Резкое падение относительных объемных показателей
электротехнической промышленности по сравнению с динамикой изменения продукции
промышленности и машиностроения за 1992-1999 годы может быть объяснено только
потерей внутреннего рынка отечественным производителем. Во многом это
определяется существующим на сегодня противоречием: предметная специализация
производства изделий электротехники и комплектный характер использования их
любым потребителем. Это противоречие разрешалось централизованной
товаропроводящей сетью, характерной для командно-распределительной системы.
Разрушение этой системы без адекватного изменения стратегии производства и
привело к потерям на внутреннем рынке.
Таким образом, переход к рыночной системе хозяйствования
требует поворота вектора стратегии производства в электротехнике от
преимущественного выпуска единых серий и параметрических рядов изделий к
преимущественному выпуску комплектного электротехнического оборудования.
Основное отличие структурной перестройки в системе организации общественного
производства, таким образом, заключается в расширении функций обслуживания
потребителя. В сложившихся условиях производству, продолжающему работать в
прежней организационной системе предметной специализации отраслей, необходима
мобильная структура, которая могла бы на переходный период к рынку обеспечить
обслуживание потребителя.
При благоприятном развитии экономики и реализации
стратегических направлений развития электротехнического производства и науки к
2013-2014 году можно ожидать увеличения производства продукции отрасли не менее
чем в 2,5 раза. Целью государственной политики в области электротехнической
промышленности является создание условий для стабилизации и развития
предприятий и организаций отрасли как одной из базовых отраслей экономики, во
многом определяющей выбор характера технологических процессов практически во
всех отраслях деятельности человека.
Государственная поддержка электротехнической промышленности
будет осуществляться по следующим направлениям:
правовое, организационное и экономическое содействие
осуществления всех мероприятий в области структурной перестройки отрасли на
основе стратегических проектов ее развития;
совершенствование управления госпредприятиями и
государственными долями собственности в акционерных обществах;
финансирование разработок новых правовых и нормативных
требований, стандартов, методов и средств сертификации, участие в
финансировании фундаментальных и поисковых исследований;
государственная поддержка предприятий-экспортеров в
международных торгах путем государственного страхования экспортных кредитов и
выдачи необходимых гарантий на участие в торгах;
поддержка отечественного производителя путем проведения
рациональной таможенной политики.
Наличие развитой в экономическом отношении электротехнической
промышленности позволит осуществить перевод всех отраслей экономики и
социальную сферу на современные технологии, обеспечивающие повышение
производительности труда, экономию энергетических, материальных и трудовых
ресурсов [1].
1. Теоретическая
часть
Разработка новых полупроводниковых преобразователей во многом
определяется успехами в развитии силовых полупроводниковых приборов. Особое
внимание уделяется разработке и совершенствованию мощных приборов, работающие
как переключатели электрического тока (тиристоры, силовые транзисторы). Эти
приборы при незначительных внутренних потерях могут управлять большими
мощностями, подводимыми к нагрузке, что открывает широкие перспективы для их
применения в различных областях техники, где требуется высокоэффективное
регулирования работы потребителя.
В преобразователях находят широкое применение ШИП постоянного
и переменного напряжений.
Широтно-импульсные преобразователи находят все более широкое
применение для регулирования и стабилизации различного рода нагрузок (на
электротранспорте, в приводе металлообрабатывающих станков), что объясняется
рядом преимуществ:
) Высокий К.П.Д, так как потери мощности на
регулирующем элементе преобразователя незначительны по сравнению с потерями
мощности в случае непрерывного регулирования.
) Слабая чувствительность к изменениям температуры
окружающей среды, поскольку регулирующими факторами является время проводимости
ключа, а не величина внутреннего сопротивления регулирующего элемента, что
имеет место при непрерывном регулировании.
) Высокое быстродействие, что особенно важно для
автоматизированного электропривода.
) Возможность получения значительных пусковых моментов
электродвигателей.
) Высокая точность управления при сохранении
устойчивости.
) Гибкость регулирования выходного напряжения в
широких пределах.
Но, однако, вместе с тем широтно-импульсным преобразователем
присущи и некоторые недостатки:
) Импульсный режим работы регулирующего элемента
обуславливает значительные пульсации выходного напряжения, что приводит к
необходимости устанавливать громадные фильтры.
) Наличие громадных фильтров вызывает инерционность процесса
регулирования в замкнутых системах.
) Импульсные преобразовательные устройства неустойчиво
работают на индуктивно-емкостную нагрузку.
) Высокие скорости включения и выключения тока в силовой
части широтно-импульсного преобразователя приводит к возникновению помех.
Но несмотря на данные недостатки, применение импульсных
преобразователей перспективно в тех случаях, когда на первое место выдвигается
требования высокой экономичности, надежности, малых габаритов, малой
чувствительности к колебаниям температуры, высокой гибкости и точности
регулирования.
Следует отметить, что электроприводы с двигателями
постоянного тока и широтно-импульсные преобразователи (ШИП-Д), питающиеся от
сети переменного тока через полупроводниковый выпрямитель, последние
десятилетия все чаще применяются в металлообрабатывающих станках, роботах,
кузнечнопрессовом оборудовании, а так же в других областях машиностроения.
Специфичность электромагнитных и энергетических процессов в
электроприводах ШИП-Д, работающих с частотой модуляции 1 -10 кГц, обусловило
ряд преимуществ по сравнению с электроприводами выполненными по схеме
«Управляемый выпрямитель - двигатель» (УВ-Д). К таким преимуществам относятся:
более высокое быстродействие обработки управляющих и
возмущающих воздействий;
более высокая плавность вращения двигателя;
меньшие потери в двигателе и более высокий коэффициент
мощности во всем диапазоне угловых скоростей;
меньшие габаритные размеры силового трансформатора и дросселя
в якорной цепи, и в некоторых случаях и двигателя, и следовательно, снижение
удельного расхода меди и стали для всего электропривода с ШИП на 1 нм на валу
двигателя;
снижение потерь и уровня высокочастотных помех в промышленных
сетях.
Выпуск серийных систем ШИП-Д и внедрение их в станкостроение
началось в 1969 году на несколько лет раньше чем в других странах. Дальнейшее
совершенствование ШИП-Д в направлении увеличения их мощности, эксплуатационной надежности,
диапазона регулирования, быстродействия и КПД, сокращение массогабаритных
показателей вызвало необходимость проведения новых, уточненных исследований в
области математического описания и моделирования установившихся и переходных
процессов, расширенных исследований энергетических процессов тормозных режимов
в ШИП-Д в схемах с переменной структурой силовых коммутирующих цепей,
разработка более экономичных систем тиристорных и транзисторных ШИП и,
соответственно, более совершенных систем логического управления, и наконец,
новых конструктивных решений при создании одно и многокоординатных систем
ШИП-Д.
Развитие статических полупроводниковых преобразователей для
регулируемого электропривода постоянного тока непосредственно связано с
разработкой и освоением новых и совершенствованием существующих
полупроводниковых приборов. Промышленное освоение тиристоров позволило создать
управляющие выпрямители для электроприводов, питающихся от сети переменного
тока, и импульсные преобразователи для электроприводов, питающихся от сети
постоянного тока и аккумуляторных батарей. В дальнейшем в некоторых областях
машиностроения оказалось целесообразно использовать импульсные (тиристорные и
транзисторные) преобразователи для питания от сети переменного тока через неуправляемый
выпрямитель и фильтр [2].
Принципиальная схема регулирования напряжения на обмотках якоря
двигателя постоянного тока приведена на рис. 1.1а, графики напряжения и тока на
рис. 1.1б. При периодическом включении и отключении полупроводникового устройства
(ключа) К на нагрузку подается серия прямоугольных импульсов напряжения,
амплитуда которых равна рабочему напряжению источника питания U, и (скважность) ɣ-отношению длительности импульса tн к длительности периода Тк работы ключа ɣ= . Среднее напряжение на нагрузке (якоре)
при этом равно Uя ср может регулироваться в широких
пределах ɣ(скважности) от 0 до 1.
. Среднее напряжение на нагрузке (якоре)
при этом равно Uя ср может регулироваться в широких
пределах ɣ(скважности) от 0 до 1.

Рисунок 1.1 - Принципиальная схема регулирования напряжения на
обмотках якоря двигателя постоянного тока
В интервалах tн ток якоря
нарастает под действием Uср, в интервале Tк-Tн ток якоря замыкается через обратный диод
и спадает по мере уменьшения ЭДС самоиндукции.
На первом этапе развития импульсного регулирования скорости
электродвигателя в качестве ключей использовались контактные аппараты, частота
коммутации fk в которых была ограничена в пределах 5-20
Гц. При таких значениях fk
электромагнитная постоянная времени двигателя Тя<<Tк. Вследствие этого пульсация тока, момента и скорости
достигли существенных значений, потери в двигателе значительно превышали
потери, возникающие в системах Г-Д и УВ-Д. В современных импульсных
преобразователях в качестве коммутирующих ключей применяют полупроводниковые
приборы, обеспечивающих частоту коммутации от 1 до 20 кГц. При этом
Тк<<Тя, пульсации тока и соответственно потери в обмотке якоря
существенно снижены (КПД-87%). Но с ростом частоты fк увеличиваются потери в ключе и магнитопроводе двигателя, поэтому
выбор оптимальной частоты коммутации выполняется с учетом конкретных параметров
электропривода. В существующих электроприводах применяется регулирование с fк =сonst.
Такие преобразователи называются широтно-импульсными (ШИП). В
некоторых электроприводах используется модуляция с fк=1кГц и постоянным интервалом между импульсами Тк-tн =const.
Рисунок 1.2 - Упрощенная функциональная схема ШИМ
С выхода ШИМа сигнал в импульсной форме с необходимым значением fk и ɣ подается на вход силового ключа.
Силовой ключ коммутирует напряжение Uр
источника питания на нагрузке Д. Оптимальным ключом для импульсного
преобразователя является полностью управляемый полупроводниковый прибор,
шунтированный быстродействующим прибором (диодом). К числу таких приборов
относятся транзисторы, запираемые сигналом управления, тиристоры и гибридные
интегральные модули на их основе.
В настоящее время мощность тиристорных ШИП уже доходит до 6000
кВт. Основными недостатками тиристорных ключей является их неполная
управляемость и необходимость применения для их запирания специальных
источников мощных запирающих импульсов. Вследствие этого массогабаритные
показатели и КПД тиристорных ШИП несколько ниже транзисторных. В настоящее
время транзисторные ШИП широко применяется в различных отраслях промышленности
и сельского хозяйства. Опыт создания ШИП, получивших широкое развитие в
электроприводах постоянного тока, начинает использоваться при создании
регулируемых электроприводов с бесколлекторными двигателями и также с
асинхронными двигателями [3].
1.1
Классификация широтно-импульсных преобразователей
Существующие схемы ШИП на тиристорах можно классифицировать
по ряду признаков.
Импульсные преобразователи постоянного напряжения делятся на
две большие группы:
) нереверсивные
) реверсивные
Последние обычно используются для регулирования
электроприводов и представляют собой широко известные схемы автономных мостовых
инверторов напряжения.
Нереверсивные ШИП можно разделить на два класса: параллельные
и последовательные.
Последовательные
ШИП
В последовательных ШИП рабочий тиристор VS1 включен последовательно
с нагрузкой. В схеме предусмотрен коммутирующий узел (для запирания рабочего
тиристора) и система управления. Выходная часть устройства состоит из
фильтрующего дросселя Lф, нагрузки Rн и диода VD1.
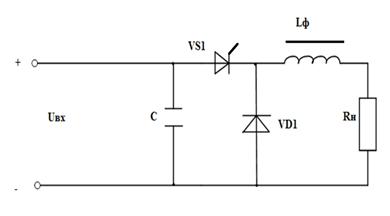
Рисунок 1.3 - Схема последовательного ШИП
постоянного напряжения
Характерной особенностью последовательных ШИП является
получения напряжения на их выходе выше напряжения источника питания. Схемы
последовательных ШИП строятся двояко в зависимости от выполнения узлов
коммутации. В одних устройствах узел коммутации связан либо с цепью рабочего
тиристора, либо с цепью нагрузки, в других он отделен от этих цепей.
Зависимые
ШИП с зарядом коммутирующего конденсатора через рабочий тиристор
Принцип действия этой схемы заключается в следующем. При
отпирании рабочего тиристора VSp ток протекает через нагрузку, и конденсатор С
заряжается до напряжения источника через тиристор VSp и резистор Rк. При подаче
управляющего импульса на тиристор VSк конденсатор С разряжается через тиристоры VSp и VSк, что приводит к
запиранию тиристора VSр. При работе данной схемы на емкостную нагрузку или нагрузку
другого вида с против Э.Д.С. в процессе коммутации возникают недопустимо
большие токи.
Существенным недостатком ШИП с параллельной емкостной
коммутацией является то, что в процессе переключения напряжения на нагрузке
достигает удвоенных значений питающего напряжения. От этого недостатка свободна
схема с резонансной коммутацией. В схеме с резонансной коммутацией в течении
интервала коммутации напряжение на нагрузке меняется менее чем на 2 вольта.
ШИП с автотрансформаторной коммутацией отличает то, что заряд
коммутирующего конденсатора происходит за счет магнитной связи обмоток
автотрансформатора. Это обуславливает более устойчивую коммутацию при изменении
нагрузки. Схема обеспечивает возможность коммутации значительных токов при
меньшем значении емкости коммутирующего конденсатора. ШИП с
автотрансформаторной коммутацией менее чувствителен к вибрациям, не требует
сложной настройки и удобен в эксплуатации, что дало ему широкое распространение
в регулировочном электроприводе. Заряд коммутирующих конденсаторов
рассмотренных схем осуществляется через рабочий тиристор, что приводит к сбоям
в работе ШИП в результате ухудшение перезаряда конденсатора при снижении
нагрузки.
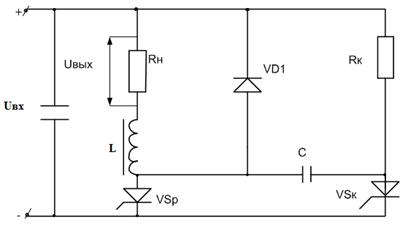
Рисунок 1.4 - ШИП с параллельной емкостной коммутацией
Зависимые
ШИП с зарядом коммутирующего конденсатора через нагрузку
В данной схеме ШИП к моменту отпирания рабочего тиристора VSp коммутирующий
конденсатор заряжается до напряжения источника питания через элемент Lк, VD, Lф, Rн.отпирание рабочего
тиристора приводит к появлению тока в нагрузке. После включения коммутирующего
тиристора образуется колебательный контур Lк, С, VSк.
Рисунок 1.5 - ШИП с дополнительным тиристором
В течение первого полупериода колебаний ток разряда конденсатора
протекает через тиристор VSк в прямом
направлении. Диод VDк не сможет пропустить ток до тех пор,
пока не изменится знак напряжения на конденсаторе, а ток в колебательном
контуре не достигает нулевого значения. Такой момент наступит после перезаряда
конденсатора. Диод VDк открывается, в результате чего
образуется новый колебательный контур Ск, Lк, VDк, VSp, ток которого снимается до нуля. После запирания тиристора
конденсатор Ск разряжается через нагрузку.
В процессе коммутации броски тока через тиристор VSк намного превышает амплитуду тока через
рабочий тиристор данная зависимость наиболее сильно проявляется при высокой
частоте коммутации ШИП. Это приводит к необходимости увеличения
помехоустойчивости коммутирующего тиристора. Все это является ограничением
применения данной схемы.
ШИП
с дросселем насыщения
В данной схеме коммутация осуществляется с помощью
насыщающегося дросселя. Дроссель насыщения выполняет те же функции, что и
элемент VSк, Lк, VDк, в предыдущей схеме. Кроме того дроссель насыщения обеспечивает
задержку времени, которая осуществлялась цепью управления тиристора VSк.
Достоинство данной схемы в том, что здесь применяется один
тиристор, что упрощает схему управления. Недостаток схемы это значительная
установленная мощность дросселя насыщения.
ШИП
с комбинированной коммутацией
При комбинированной коммутации обеспечиваются преимущества
обеих рассмотренных ранее ШИП. ШИП с комбинированной коммутацией более
экономичен, так как используемые в нем дроссель насыщения и тиристор VSк имеет меньшую мощность,
чем в предыдущих схемах. Диод VDL предотвращает протекание обратного тока через
дроссель Lк
и, следовательно, срыв колебаний в коммутирующем узле схемы.
Здесь дополнительный тиристор VSк, линейный дроссель Lк и дроссель насыщения Lн обведенным в одном
коммутирующем контуре.

Рисунок 1.6 - ШИП с комбинированной коммутацией
Комбинированная коммутация снижает установленную мощность
тиристора VSк до 30% по сравнению со схемой ШИП с дополнительным тиристором,
габариты дросселя уменьшаются в несколько раз по сравнению со схемой ШИП с
дросселем насыщения. ШИП с а комбинирующей коммутацией оказывается более
экономичным и малогабаритным, что обусловливает целесообразность его
применения.
Общим недостатком этих схем является связь контура коммутации
с цепью нагрузки, что затрудняет коммутацию в режимах малых нагрузок и делает
невозможной работу установки на холостом ходу. Для устранения этого недостатка
достаточно внести в контур коммутации специальные зарядные цепочки L3, VD3, и рабочий тиристор
зашунтировать встречным диодом и индуктивностью.
Независимые
ШИП с последовательной трансформаторной коммутацией
Импульсные преобразователи с независимыми коммутирующими
узлами обеспечивает устойчивую работу систем питания в широком диапазоне
нагрузок.
В схемах независимых ШИП в качестве источника запирающего
напряжения обычно используется предварительно заряженный конденсатор. При
подаче напряжения Uк на контур коммутации происходит резонансный заряд конденсатора С
через элементы VDк, Lк, и первичную обмотку импульсного трансформатора. Рабочий
тиристор VSp отпирается по цепи управления, в результате чего нагрузка
питается током от источника питания. Для выключения рабочего тиристора
включается тиристор VSк, в результате конденсатор С разряжается через тиристор VSк и первичную обмотку
импульсного трансформатора, на вторичной обмотке которого создается напряжение
обратное по знаку питающему напряжению и превышающее его по величине,
следовательно ток в цепи рабочего тиристора прерывается. Коммутирующий тиристор
VSк начнет запираться,
после достижения токами разряда конденсатора нулевого значения. Схема
применяется, когда необходимо разделить по напряжению питания контур коммутации
и силовую цепь.
Рисунок 1.7 - ШИП с последовательной трансформаторной коммутацией
Независимые
ШИП с двойным коммутирующим контуром
Для питания дополнительной нагрузки пошли применение ШИП с
двойным коммутирующим контуром. Схема включает в себя рабочий тиристор VSp и четыре вспомогательных
тиристора VS1, VS1’, VS2, VS2’ основное назначение которых надежное запирание рабочего
тиристора VSp.
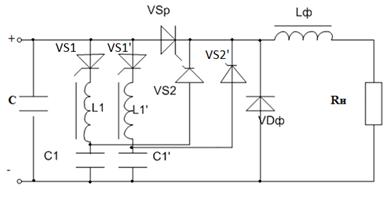
Рисунок 1.8 - ШИП с двойным коммутирующим контуром
Контур L, C1, L1’, C1’ является резонаторными. Импульсные преобразователи с двойными
коммутирующими узлами обеспечивают надежную работу устройства в режимах малых
нагрузок, позволяет получать высокую гибкость и плавность регулирования в
широком диапазоне скоростей электропривода. Недостаток схемы сложность
коммутирующего узла и отсюда сложность систем управления тиристора [4].
Параллельные
ШИП
Особенностью параллельных ШИП является возможность получения
напряжения на нагрузке, превышающие по величине напряжения источника питания.
В качестве импульсного тиристора VSp который периодически
замыкает источник питания на дроссель Lф. В процессе замыкания рабочего тиристора на
дросселе Lф
наводится значительная Э.Д.С, направленная согласно с напряжением источника
питания, в результате чего диод VDф и выходной конденсатор Свых течет ток, имеющий
форму всплеска. Напряжение на нагрузке при этом равно сумме напряжений на
дросселе Lф
и источника питания. Диод VDф подключается к отводу фильтрующего дросселя Lф рисунок 1.9б Такое
включение позволяет снизить потери мощности на коммутацию за счет снижения
величины di/dt, но степень повышения выходного напряжения при этом также
уменьшается. Данная схема применяется, если необходимо поддерживать выходное
напряжение стабильным при изменении нагрузки.
Если требуется широкий диапазон регулирования выходного
напряжения применяется схема на рисунок 1.9в с подключением рабочего тиристора
к отводу фильтрующего дросселя. Эта схема обладает худшими энергетическими
показателями за счет увеличения коммутационных потерь.
Основные различия рассмотренных схем ШИП заключается в
особенностях выполнения их коммутирующих узлов, исходя из чего и приведена
классификация существующих схем.
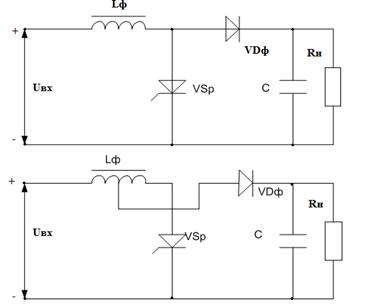
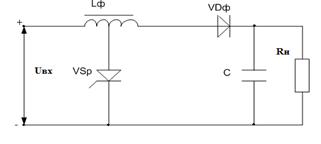
Рисунок 1.9 - Схемы параллельных ШИП постоянного напряжения
Схема
ШИП с параллельной коммутацией и приложение к запирающему тиристору обратного
напряжения

Рисунок 1.10 - Схема ШИП с параллельной коммутацией и
приложение к запирающему тиристору обратного напряжения
В этой схеме тиристор VS1 работает, а тиристор VS2 коммутирующей, который
входит в состав колебательного контура запирания (Lк, Ск). Рабочий тиристор
запирается при включении коммутирующего тиристора. При этом подключается
колебательный контур, изменяющий полярность подключенного напряжения на
запираемом тиристоре. При параллельной коммутации предварительно заряженный
конденсатор при помощи тиристора VS2 подключается параллельно выключаемому тиристору
VS1. В результате после
запирания тиристора коммутирующего конденсатор полностью или частично
перезаряжается током нагрузки (нагрузка активно-индуктивная) [5].
2.
Конструкторская часть
.1
Описание преобразователя ТЕ9
В состав агрегата ТЕ9 входят сам агрегат и дистанционный
пульт управления. Агрегат состоит из платы широтно-импульсного модулятора
(ШИМ), платы формирователей запускающих импульсов (ФЗИ), силового каскада,
выходных трансформаторов ФЗИ и задатчика для дистанционного управления
агрегатом, которые смонтированы на панели из влагостойкого материала. Панель
встроена в корпус из листовой стали и крепится в нем на петлях.
ШИМ собран на кремниевых n-p-n транзисторах.
В нижней части корпуса установлен разъем для внешних электрических
соединений.
Для естественного охлаждения агрегата предусмотрены жалюзи в
верхней и нижней части корпуса.
Пульт дистанционного управления помещен в специальный кожух.
В агрегате применен широтно-импульсный метод регулирования
среднего тока в цепях с индуктивной нагрузкой. Сущность этого метода
заключается в том, что напряжение на нагрузку (обмотку возбуждения якоря)
подается через ключ в течении некоторой части периода, можно изменить
напряжение на нагрузке, а следовательно и ток протекающий через нее.
Основным регулирующим силовым элементом, выполняющим функции
ключа, служит тиристор. Тиристор управляется при помощи схемы с коммутирующими
конденсаторами и вспомогательным тиристором.
Ширина импульсов вырабатываемых ШИМ, следовательно и среднее
напряжение на нагрузке, определяется величиной управляющего напряжения
поступающего с ЗУН.
Импульсы с ШИМ поступают на У1, ФИ1, У2, ФИ2. Сформированные
ФИ1 импульсы тока управляют тиристором, выполняющим функции силового ключа.
Сформированные ФИ2 импульсы тока управляют тиристором КУ, К, и в комплексе
представляют силовой каскад, регулирующий среднее напряжение на нагрузке.
Схема электрическая принципиальная рисунок 2.1
рассматривается совместно с электрическими принципиальными схемами платы ШИМ, и
платы ФЗИ.

Рисунок 2.1 - Структурная схема агрегата серии ТЕ9

Рисунок 2.2 - Принципиальная электрическая схема
преобразователя ТЕ-9
Плата
ШИМ
Управляющее напряжение задатчика поступает с контакта 3
разъема 10 на контакт 3 платы ШИМ и на базу транзистора V5, работающего в режиме
эмиттерного повторителя. С резистора R5 управляющее напряжение подается через резисторы
R10 и R11 на базу транзистора V16, а через резистор R9, каскад инвертора, собранного
на транзисторе V7, и резистор R16 - на базу транзистора V11.
Изменяя управляющее напряжение на транзисторах V11, V16 можно регулировать
момент переброса мультивибратора в течении периода, т.е. регулировать
скважность вырабатываемых импульсов. Переброс схемы из одного состояния в
другое осуществляется при помощи коллекторно-базовых связей, через эмиттерные
повторители V13,
V15, что делает ее
независимой к параметрам транзисторов.
Частотная характеристика мультивибратора определяется
емкостью конденсаторов С6, С8.
Импульсы, вырабатываемые мультивибратором, снимаются с
резисторов R19,
R26 и подаются
соответственно на усилители прямоугольных импульсов, собранные на транзисторах V21, V17, а затем через
дифференцирующие цепи C11-R30 и C10-R28 на предварительные каскады формирователей импульсов,
запускающих тиристоры. Предварительные каскады формирователей импульсов собраны
на транзисторах V18, V22.
Ток через транзистор V18 ограничен резисторами R32, R33, а ток через
транзистор V22-резисторами
R35 и R36. Эти резисторы
смонтированы на плате ФЗН.
Питание схемы ШИМ застабилизированно стабилитроном V25, который подключен
параллельно с источником питания. Конденсатор С12 фильтрующий.
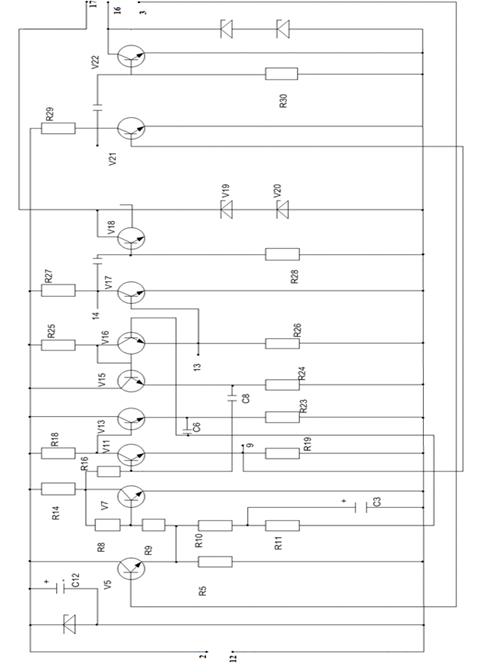
Рисунок 2.3 - Схема электрическая принципиальная платы ШИМ
Плата
ФЗИ
Выходные каскады формирователей представляют собой эмиттерные
повторители, собранные на транзисторах V26, V28.
Каскад на транзисторе V26 запускает тиристор V2, каскад на транзисторе V28 - тиристор V4.
Запускающий импульс формируется при разряде конденсатора С1
(С2) через открытый транзистор V26, V28 и первичную обмотку трансформатора Т1, Т2. При этом во
вторичной обмотке трансформатора Т1, Т2 индуктируется остроконечный импульс,
поступающий через R34, V27 (R37, V29) на управляющий электрод тиристора V2, V4.
Заряд конденсатора С1 осуществляется через резистор R2 (R3) и первичную обмотку
трансформатора Т1 (Т2) в моменты времени, когда транзистор предварительно
каскада V18,
V22 заперт, и напряжение
на нем равно падению напряжения на стабилитронах V19, V20 и V23, V24.
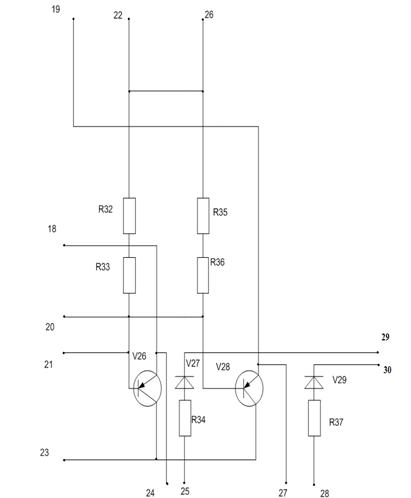
Рисунок 2.4 - Схема электрическая принципиальная платы ФЗИ
Силовой
каскад
Силовой каскад представляет собой прерыватель постоянного
тока на тиристорах с искусственной емкостной коммутацией.
В состав каскада входят. Тиристор V2-силовой ключ, тиристор V4 - коммутирующий
тиристор. Конденсаторы С4, С5 - коммутирующие конденсаторы.
Дроссели L1 и L2, диоды V1, V5, V6-перезарядные цепи.
Диод V3 - для обеспечения непрерывного тока через нагрузку.
Работа
силового каскада преобразователя ТЕ 9
При поступлении запускающего импульса на тиристор V4, последний отпирается,
конденсатор С4 заряжается до напряжения источника питания ключом на левой
обкладке. После этого, в соответствии со скважностью импульсов ШИМ, поступает
импульс на V2,
тиристор V2
отпирается, к нагрузке прикладывается напряжение питающей сети. Одновременно
конденсатор С4 перезаряжается через V2, L2, V5 и V6 плюсом на правой обкладке, а конденсатор С5 заряжается
примерно до двойного напряжения питающей цепи.
При поступлении следующего импульса тиристор V4 отпирается, к тиристору
V2 прикладывается
напряжение конденсаторов С4, С5 обратной полярности, тиристор V2 приходит в непроводящее
состояние, конденсатор С5 разряжается через тиристор V2 и нагрузку, а
конденсатор С4 заряжается до напряжения питающей сети. После заряда
конденсатора С4, тиристор V4 закрывается. Далее процессы повторяются.
Время, за которое в течение периода тиристор V2 проводит электрический
ток, определяет среднее напряжение на нагрузке. Это время зависит от скважности
импульсов ШИМ, изменяя которую можно в широких пределах регулировать
напряжение, следовательно, и ток нагрузки.
.2
Расчет параметров системы ШИП-Д при работе на якорь и обмотку возбуждения
Регулирование напряжения на зажимах двигателя осуществляется
импульсным методом, когда двигатель периодически подключается к источнику
питания и отключается от него. При этом в тот период, когда двигатель
подключается к источнику питания, происходит передача энергии от источника к
электроприводу, которая главным образом передается через вал двигателя
производственному механизму, а часть ее запасается кинетической и
электромагнитной энергией, в период же отключения электропривод продолжает
работать за счет запасенной энергии.
На схеме (см. рисунок 2.5) якорь двигателя с помощью
коммутирующего ключа К периодически подключается к источнику питания
постоянного тока.
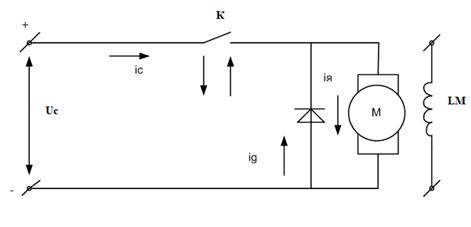
Рисунок 2.5 - Упрощенная схема ШИП
В период включенного состояния ключа ток якоря iя равен току ic поступающего от
источника питания через ключ К, так как включенный параллельно якорю диод VD в этом случае закрыт в
результате подачи на его анод отрицательного напряжения источника питания.
После размыкания ключа К под действием Э.Д.С самоиндукции в цепи якоря
продолжает протекать ток, замыкаясь через диод VD т.е. в этот период iя = iq.
На рисунке 2.6 изображены диаграммы тока и напряжения на
двигателе. Диаграммы построены при условии, что коммутация ключа осуществляется
мгновенно, т.е. цепи источника питания и диод не обладают индуктивностью.
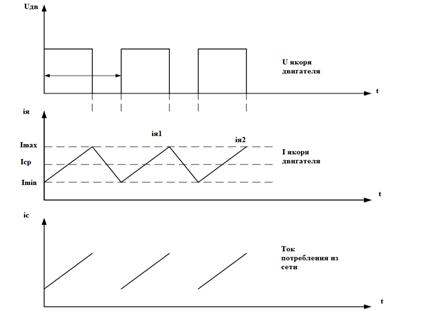

Рисунок 2.6 - Диаграмма напряжений
При указанном условии для рассматриваемой схемы
электропривода могут быть записаны следующие уравнения:
Для периода замкнутого состояния ключа К
 (1)
(1)
 (2)
(2)
 (3)
(3)
Для периода разомкнутого состояния ключа К
 (4)
(4)
 (5)
(5)
 (6)
(6)
Где Мс и J - соответственно момент статической нагрузки на валу
двигателя и момент инерции системы электропривода.
При записи этих управлений мы принимаем, что источник питания
обладает свойствами источника напряжения, т.е. его внутреннее сопротивление
пренебрежимо мало, а диод VD обладает идеальными свойствами, его
сопротивление равно в проводящем направлении и бесконечности в обратном
направлении.
Для анализа установившегося режима работы привода (точнее,
квазиустановившегося) необходимо проанализировать соотношения между средними
значениями тока, момента, скорости, напряжения. При этом имеется ввиду среднее
значение указанных величин за период коммутации К. Из (3) и (6) полагая, что за
время Тк момент Мс =const. Можно найти:

Для квазиустановившегося режима должны соблюдаться
соотношения  т.е.
т.е.
мгновенные значения скорости в начале и конце периода равны
друг другу, т.к. в противном случае имеет место переходный процесс, а не
квазиустановившейся режим. Учитывая также, что  из предыдущего выражения
можно найти:
из предыдущего выражения
можно найти:

Всегда в соответствии с (2) и (5)
 (7)
(7)
С другой стороны из (1) и (4)


Учитывая, что в квазиустановившемся режиме  и обозначив
и обозначив 
 находим
находим
 (8)
(8)
Отсюда получаем уравнение скоростной характеристики системы ШИП-Д
 (9)
(9)
Из (9) следует, что изменение относительной величины замкнутого
состояния ключа при скважности  позволяет осуществить регулирование угловой скорости двигателя.
Выражение (9) справедливо только в том случаи, когда в цепи якоря проходит
непрерывный ток [3].
позволяет осуществить регулирование угловой скорости двигателя.
Выражение (9) справедливо только в том случаи, когда в цепи якоря проходит
непрерывный ток [3].
Рассчитаем параметры нашей системы ШИП-Д, имея некоторые исходные
данные:
Исходными данными для расчета являются данные двигателя типа
СЛ-621. В таблице 2.1 приведены паспортные данные двигателя СЛ-621 [6]
Таблица 2.1 - Паспортные данные двигателя СЛ-621
|
Тип
|
Uном
|
Iном
|
Pном
|
nном
|
Mном
|
Rя
|
Rвозб
|
КПД
|
Вес
|
|
|
А
|
кВт
|
об/мин
|
Н мОмОм%КГ мОмОм%КГ
|
|
|
|
|
|
СЛ-621
|
110
|
2.3
|
172
|
2400
|
0.686
|
3
|
560
|
68
|
7.5
|
Чтобы получить реальную механическую постоянную, снимем ее
экспериментально.
Рисунок 2.7 - Пуск двигателя на холостом ходу
На рисунке 2.7 изображен пуск двигателя на холостом ходу,
проведем касательную с помощью которой определим механическую постоянную. Из
рисунка определяем что механическая постоянная времени равна 0,26 с.
Тм = 0,26 с.
3.
Исследовательская часть
В процессе отладки и регулирования лабораторного стенда были
сняты осциллограммы работы широтно-импульсного преобразователя типа ТЕ9. Для
снятия осциллограммы был использован осциллограф, который поочередно
подключался параллельно к обмотке якоря и обмотки возбуждения, которые питаются
от преобразователя ТЕ9.
После изготовления лабораторного стенда были сняты
экспериментальные характеристики:
осциллограммы на элементах схемы;
- регулировочная характеристика
преобразователя;
статические;
динамические.
Осциллограммы на элементах схемы
представлены на рис. 3.1. Они показывают работу схемы, обеспечивающей
нормальную работу стенда.
Регулировочная характеристика
преобразователя прямолинейна с небольшой криволинейностью в начале
характеристики. Напряжение Uтп тиристорного преобразователя плавно растет при увеличении Uупр.

Рисунок 3.1 - Временные диаграммы
3.1
Статические характеристики
На рисунке 3.2 изображены нагрузочные характеристики,
построенные по данным, которые приведены в таблицах 3.1 - 3.2
Таблица 3.1 - Таблица с данными
|
Uдв, B
|
70
|
66
|
60
|
54
|
48
|
|
I, А
|
0
|
0,05
|
0,14
|
0,22
|
0,3
|
Таблица 3.2 - Таблица с данными
|
Uдв, В
|
100
|
95
|
86
|
79
|
70
|
|
I, А
|
0
|
0,065
|
0,2
|
0,35
|
0,55
|
Рисунок 3.2 - Семейство нагрузочных характеристик
На рисунке 3.3 изображены электромеханические характеристики,
построенные по данным, которые приведены в таблицах 3.3-3.4
Таблица 3.3 - Таблица с данными
|
Uтг, В
|
18
|
17
|
15
|
12
|
10
|
|
I, А
|
0,6
|
0.625
|
0.67
|
0.62
|
0.67
|
|
n, об/мин
|
1234,26
|
1165,69
|
1028,55
|
822,84
|
685,7
|
nн=2400 об/мин при  =110В
=110В
n= · Cтг
· Cтг
Cтг
Статизм: δ=
Таблица 3.4 - Таблица с данными
|
Uтг, В3533282520
|
|
|
|
|
|
|
I, А
|
0,6
|
0.65
|
0.74
|
0.82
|
0.9
|
|
n, об/мин
|
2400
|
2262,81
|
1919,96
|
1714,25
|
1371,4
|

Рисунок 3.3 - Семейство электромеханических характеристик
Статизм ЭМХ: δ=
Семейство ЭМХ представляет собой параллельные линии,
свидетельствующие о нахождении характеристик в зоне непрерывного тока.
Регулировочные характеристики (Uдв = f(Uупр) и Uдв=f(Uтг)) изображены на
рисунках 4-5. Данные представлены в таблицах 3.5-3.6.
Таблица 3.5 - Таблица с данными
|
Uдв
|
0
|
14
|
20
|
28
|
50
|
68
|
100
|
|
Uупр
|
0,1
|
1
|
1,5
|
2
|
2,5
|
3
|
3,5
|
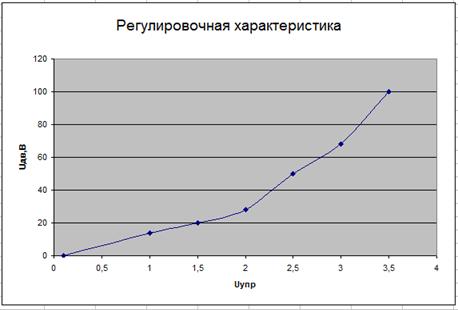
Рисунок 3.4 - Регулировочная характеристика
Таблица 3.6 - Таблица с данными
|
Uдв
|
0
|
14
|
20
|
28
|
50
|
68
|
100
|
|
Uтг
|
0
|
5
|
8
|
14
|
25
|
35
|
51
|
|
n, об/мин
|
0
|
342,5
|
548
|
959
|
1712,5
|
2397,5
|
3293,5
|

Рисунок 3.5 - Регулировочная характеристика
Регулировочные характеристики носят нелинейный характер.
Таблица 3.7 - Таблица с данными
|
С активной нагрузкой R
|
|
Uупр
|
0
|
0,6
|
1,5
|
2,5
|
3,5
|
4,4
|
7
|
|
Uвых
|
0
|
9
|
21
|
42
|
83
|
140
|
180
|
Таблица 3.8 - Таблица с данными
|
С активно-индуктивной нагрузкой R-L
|
|
Uупр
|
0
|
0,5
|
2,5
|
3
|
4
|
6
|
|
Uвых
|
0
|
10
|
34
|
54
|
60
|
140
|
185
|
Таблица 3.9 - Таблица с данными
|
С индуктивной нагрузкой L
|
|
Uупр
|
0
|
1,4
|
2,3
|
3,2
|
4,2
|
6,4
|
6,5
|
|
Uвых
|
0
|
80
|
84
|
88
|
150
|
190
|
192
|
Рисунок 3.6 - Нагрузочные характеристики
Вывод: Наилучшую форму имеет регулировочная характеристика
при активно-индуктивной нагрузке, так как данный преобразователь (ТЕ-9)
изначально проектировался для такого вида нагрузки.
3.2
Экспериментальные динамические характеристики
Для снятия динамических характеристик использовались:
переносной компьютер (ноутбук), нагрузочная машина, цифровой мультиметр.
Динамические характеристики представляют собой зависимости частоты вращения
двигателя от времени (ω = F(t)) при пуске двигателя
повышением скважности питающего напряжения, набросе и сбросе нагрузки,
торможении понижением скважности питающего напряжения. Результаты эксперимента
представлены на рисунках 3.7, 3.8, 3.9. При анализе полученных характеристик,
очевидно, что при пуске и торможении широтно-импульсный преобразователь
формирует переходные процессы. Скорость двигателя при пуске и торможении
изменяются плавно по нелинейному закону, при набросе и сбросе нагрузки
изменяются экспоненциально (т.е. характер переходного процесса определяется
механической инерцией, электромагнитная инерция практически влияния на ход
процесса не оказывает).
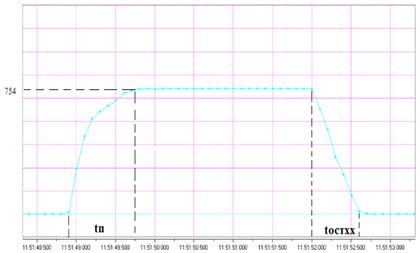
Рисунок 3.7 - Пуск двигателя на холостом ходу
tпхх=0,95с, tостхх=0,65с, 
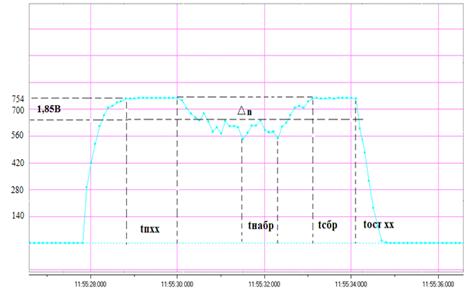
Рисунок 3.8 - Пуск в холостую наброс и сброс нагрузке остановка в
холостую
tпхх= 1 с,
tнабр=0,85 с,
tсбр=0,85 с,
tостхх= 0,65 с.
δ=

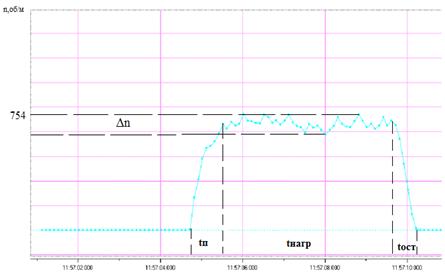
Рисунок 3.9 - Пуск и торможение под нагрузкой
tпнагр=5 с,
tостнагр=0,3 с.

4.
Экономическая часть
В электровооруженности отраслей промышленности первостепенную
роль играет электропривод, который стал самым распространенным, а в большинстве
случаев единственным средством приведения в движение исполнительных механизмов.
Обеспечивая развитие механизации и автоматизации технологических процессов, он
непосредственно воздействует на рост производительности труда.
В связи с широким развитием и внедрением в
промышленности регулируемого привода, возникает острая необходимость в
высококвалифицированных кадрах для их обслуживания. Такие инженерные кадры
очень трудно подготовить, не имея соответствующей подготовительной базы. С этой
целью возникло решение организовать в лаборатории кафедры электропривода ИрГТУ
стенд по изучению и приобретению навыков управления системой ШИП-Д.
Такие стенды расширяют кругозор студентов,
дают им практические знания о работе сложных промышленных автоматизированных
установок.
Экономическая часть дипломного проекта
состоит из нескольких разделов:
1. Сметная калькуляция на изготовление лабораторного стенда
«ШИП-Д», где учтены материалы, оборудование и комплектующие изделия. 2.
Монтажные работы.
. Наладочные работы.
. Основная заработная плата.
. Страховые взносы.
. Плановые накопления.
. Эксплуатационные расходы.
. Стоимость одного часа работы стенда.
Все расходы начисляются по данным ИАПО. 
4.1
Сметная калькуляция на изготовление лабораторного стенда «ШИП-Д»
Себестоимость лабораторного стенда может быть рассчитана
путем составления калькуляции укрупненным методом.
Стоимость материалов, покупных и комплектующих изделий и
узлов рассчитывается исходя из потребного их количества и оптовых цен.
Таблица 4.1 - Стоимость приборов и оборудования
|
№
|
Наименование, техническая характеристика
оборудования
|
ед, нзмер.
|
кол.
|
Сметная стоимость ед. оборудования (руб.)
|
Общая стоимость оборудования (руб.)
|
|
1
|
Двигатель СЛ-621-МУ2
|
шт.
|
2
|
4500
|
9000
|
|
2
|
Агрегат тиристорный ТЕ-9
|
шт.
|
1
|
11500
|
11500
|
|
3
|
Вольтметр постоянного тока М4250
|
шт.
|
2
|
1237
|
2474
|
|
4
|
Выключатель автоматический ВА47-29
|
шт.
|
1
|
70
|
70
|
|
5
|
Индикатор света красный, EKF ЛС-47
|
шт.
|
1
|
60
|
60
|
|
6
|
Потенциометр
|
шт.
|
1
|
300
|
300
|
|
Итого:
|
|
|
|
18904
|
|
Затраты на тару, транспортно-заготовительные
расходы
|
|
|
11%
|
2079
|
|
НДС
|
|
|
18%
|
3403
|
|
Итого:
|
|
|
|
28886
|
|
|
|
|
|
|
|
Таблица 4.2 - Стоимость материалов
|
№
|
Наименование, техническая характеристика
оборудования
|
ед, нзмер.
|
кол.
|
Сметная стоимость ед. оборудования (руб.)
|
Общая стоимость оборудования (руб.)
|
|
1
|
Корпус щит с монтажной панелью ЩМТ IP31.
|
шт.
|
1
|
1567
|
1567
|
|
2
|
Бокс под автоматы ИЭК КМПн ½ наружный
|
шт.
|
1
|
28
|
28
|
|
3
|
Диод В25-6
|
шт.
|
4
|
180
|
720
|
|
4
|
Кабельная стяжка КСС 3*120
|
уп.
|
1
|
60
|
60
|
|
5
|
Изолента ПВХ
|
шт.
|
2
|
15
|
30
|
|
6
|
Площадка для кабельных хомутов
|
уп.
|
1
|
60
|
60
|
|
7
|
Припой ПОС-61
|
уп.
|
1
|
40
|
40
|
|
8
|
Провод ПВ 1*0,5мм2
|
м
|
10
|
15
|
150
|
|
9
|
Провод ПВС 3*1,5мм2
|
м
|
5
|
18
|
90
|
|
10
|
кабель канал 110 мм
|
м
|
1
|
310
|
155
|
|
11
|
Вилка силовая 10А
|
шт.
|
1
|
18
|
18
|
|
12
|
розатка
|
шт.
|
1
|
35
|
35
|
|
13
|
Аэрозольный баллон с краской
|
шт.
|
1
|
150
|
150
|
|
Итого:
|
|
|
|
3043
|
|
Затраты на тару, транспортно-заготовительные
расходы
|
|
|
11%
|
335
|
|
НДС
|
|
|
18%
|
548
|
|
Итого:
|
|
|
|
3926
|
4.2
Монтажные работы
Таблица 4.3 - Стоимость монтажных работ
|
№
|
Наим. Прейскурантов
|
Наименование монтажных работ
|
Ед. Изм.
|
Кол
|
Сметная стоимость единицы монтажных работ, руб.
|
Общая стоимость монтажных работ, руб.
|
Трудоемкость Чел./час
|
|
|
|
|
|
Всего
|
В том числе зарплата
|
Всего
|
В том числе зарплата
|
|
|
1
|
СНИП-4-6-82
|
Установка исследуемого двигателя СЛ-621
|
шт.
|
1
|
2400
|
1400
|
2400
|
1400
|
2
|
|
8-481-1
|
|
|
|
|
|
|
|
|
|
2
|
8-105-6
|
Установка широтно-импульсного преобразователя ТЕ-9
|
шт.
|
1
|
4600
|
2800
|
4600
|
2800
|
6
|
|
3
|
8-525-1
|
Установка автоматического выключателя ВА47-29
|
шт.
|
1
|
300
|
135
|
300
|
135
|
1
|
|
4
|
8-526-1
|
Установка бокса под автоматы
|
шт.
|
1
|
300
|
160
|
300
|
160
|
2
|
|
5
|
8-591-6
|
Подключение потенциометра
|
шт.
|
1
|
450
|
285
|
450
|
285
|
0,5
|
|
7
|
8-525-1
|
Установка светового сигнализатора
|
шт.
|
1
|
200
|
90
|
200
|
90
|
1
|
|
8
|
8-574-18
|
Подключение АВ к сети
|
шт.
|
1
|
210
|
90
|
210
|
90
|
0,2
|
|
9
|
8-574-18
|
Подключение светового сигнализатора к сети
|
шт.
|
1
|
210
|
90
|
210
|
90
|
0,2
|
|
10
|
8-574-54
|
Подключение вольтметра
|
шт.
|
2
|
800
|
480
|
1600
|
960
|
0,5
|
|
11
|
8-574-56
|
Подключение диода
|
шт.
|
4
|
200
|
70
|
800
|
280
|
0,5
|
|
12
|
8-481-30
|
Подготовка к сдаче на наладку
|
шт.
|
1
|
3000
|
1650
|
3000
|
1650
|
2
|
|
13
|
4-75
|
Установка розетки
|
шт.
|
1
|
300
|
200
|
300
|
200
|
0,5
|
|
14
|
4-32
|
Установка кабель канала 100 мм
|
м
|
350
|
230
|
350
|
230
|
1
|
|
15
|
4-8
|
Монтаж вилки
|
шт.
|
1
|
120
|
80
|
120
|
80
|
0,1
|
|
16
|
6-12
|
Покраска корпуса ШИП ТЕ-9
|
М2
|
0,5
|
500
|
280
|
250
|
140
|
0,2
|
|
|
Итого:
|
|
|
13940
|
8040
|
15090
|
8590
|
|
Пункт 13-16 на основании данных фирмы «Радиан» г. Иркутск
4.3
Наладочные работы
Таблица 4.4 - Стоимость наладочных работ
|
№
|
Наим. Прейскурантов
|
Наименование монтажных работ
|
Ед. изм
|
Кол
|
Сметная стоимость единицы монтажных работ, руб.
|
Общая стоимость монтажных работ, руб.
|
Трудоемкость Чел./час
|
|
|
|
|
|
Всего
|
В том числе зарплата
|
Всего
|
В том числе зарплата
|
|
|
1
|
НЭ-647
|
Наладка широтно-импульсного преобразователя
ТЕ-9
|
шт.
|
1
|
3500
|
1800
|
3500
|
1800
|
6
|
|
|
Итого:
|
|
|
3500
|
1800
|
3500
|
1800
|
|
4.4
Затраты на основную заработную плату
После составления сметы на приобретение
электрооборудования, монтажные работы и наладку лабораторного стенда, подсчитаем
затраты на основную заработную плату при производстве монтажных и наладочных
работ, а также и с учётом коэффициента в 60%(30% районный коэффициент и 30% за
стаж).
Зосн=К*(Зосн.м+Зосн.н)=1,6*(8590+1800)=16624
руб.
Зосн =16624 руб.
Страховые взносы составляют 30% от
основной заработной платы:
 руб.
руб.
Накладные расходы составляют от основной заработной платы 12%.
Нрасх= =руб.
=руб.
Плановые накопления берутся в размере 5% от общей стоимости:
Пнак=(8590+1800+4987,2+1994,88)*0.05=868,6 руб.
Пнак=868,6 руб.
капитальные вложения (расходы) составят: К=С+Км+Кн+Ктр,
где
С-стоимость оборудования и материалов;
Км - стоимость монтажных работ;
Кн - стоимость наладочных работ;
Ктр - стоимость транспортных расходов.
К=28886+3926+15090+3500=51402 руб.
Полученные данные внесём в таблицу общих затрат.
Таблица 4.5 - Общие затраты
|
№
|
Наименование затрат
|
Сумма(руб.)
|
уд. вес в% к стоимости
|
|
1
|
Электрооборудование, комплектующие изделия,
затраты на тару и транспорт
|
28861
|
40,14%
|
|
2
|
Монтажные работы
|
15090
|
20,98%
|
|
3
|
Основная заработная плата
|
16624
|
23,11%
|
|
4
|
Наладочные работы
|
3500
|
4,86%
|
|
5
|
Страховые взносы
|
4987,2
|
6,93%
|
|
6
|
Накладные расходы
|
1994,88
|
2,77%
|
|
7
|
Плановые накопления
|
868,6
|
1,21%
|
|
Всего:
|
71925,68
|
100%
|
4.5
Расчёт эксплуатационных расходов при использовании стенда «ШИП-Д»
Величина эксплуатационных расходов определяется по формуле
С=СА+Ср+Сэ+С3, где 
СА - амортизационные отчисления
основных фондов;
Ср-затраты на текущий ремонт;
Сэ - затраты на электроэнергию;
Cз - затраты на заработную
плату обслуживающего персонала.
Амортизационные отчисления рассчитывают
следующим образом
 , где
, где
НА-норма амортизационных
отчислений, для лабораторного оборудования
НА=5%!
П - полная стоимость основных фондов

При малых мощностях электрооборудования затраты на текущий ремонт
определяются в процентном отношении от полной стоимости. Для
широтно-импульсного преобразователя Крем=5%
СР=(Крем*П)/100
 руб./год
руб./год
Затраты от потерь электроэнергии за год определяются по формуле:

где  стоимость 1 кВт/час электроэнергии = 0,72
руб.;
стоимость 1 кВт/час электроэнергии = 0,72
руб.;
Рном - номинальная мощность
кВт;
 -КПД оборудования=0,7
-КПД оборудования=0,7
Кзагр - коэффициент загрузки, Кзагр ;
;
Т - действительный фонд времени (час) и определяется по формуле:
Т= к-n-р
где К - коэффициент использования оборудования (К=0.9);
n - число учебных дней в году;
р - продолжительноcть работы
стенда в день, р=2 часа.
Т=0,9*216*2=388,8 часа
Следовательно:
Сэ =(0,72*0,4*(1-0,7)*0,8*389)/0,7=38,41 руб.
Затраты на заработную плату обслуживающего
персонала:
С3=Зосн + Ос
Зосн - основная заработная
плата;
Ос - страховые взносы;
С3=16624+4987,2=21611,2 руб.
Полная величина эксплуатационных расходов составит:
С=3596,28+3596,28+38,41+21611,2=28842,17 руб.
Стоимость одного часа работы стенда «ШИП-Д» составит: СГ
=С/ТГ
где С-эксплуатационные расходы;
Тг-время работы стенда час/год.
Сг= 28842,17/389=74,14 руб.
Стоимость одного часа работы стенда «ШИП-Д» составит 74,14
рубля.
Таблица 4.6 -
Технико-экономические показатели
|
№
|
Показатели
|
ед. изм
|
Проектный вариант
|
|
1
|
Стоимость лабораторного стенда
|
руб
|
71925,68
|
|
2
|
Эксплуатационные расходы
|
руб./год
|
28842,17
|
|
3
|
Стоимость одного часа работы стенда
|
руб./час
|
74,14
|
Таким образом, в данном дипломном проекте была составлена
сметная калькуляция на изготовление лабораторного стенда «ШИП-Д», были
произведены расчёты сметной стоимости и заработной платы, эксплуатационных
расходов, а также подсчитана стоимость одного часа работы стенда.
Заключение
Современные технологии производства требуют освоения
сложнейших аппаратов, поэтому нужны специалисты высокой квалификации. В
лаборатории ИрГТУ разработан стенд системы «Широтно-импульсный
преобразователь - Двигатель».
Назначение лабораторного стенда «ШИП-Д» создать на практике
условия для приобретения в период обучения навыков исследовательской работы
студентами.
Лабораторные занятия требуют от студентов большой
самостоятельности и призваны воспитывать в них общую ответственность за
качество их работы, приучают к практической оценке своих действий, учат
суммировать и обобщать итоги работы.
Цель лабораторного практикума - формирование у студентов
умений и навыков экспериментаторов.
Список
литературы
1. Журнал
Энергосбережение Дек.2012.
2. Чиженко И.М., Руденко B.C., Сенько В.И. Основы
преобразовательной техники: Учеб. пособие для вузов. - М.: «Высшая школа»,
1974. - 430 с.
3. Герман - Галкин С.Г. Широтно-импульсные
преобразователи: Учебное пособие для вузов. - Л.: Энергия 1979.
. Башарин А.В., Новиков В.А., Соколовский Г.Г.
Управление электроприводами: Учебное пособие для вузов. - Л.: Энергоиздат.
Ленингр. отд-ние, 1982. - 392 с.
5. Гольц М.Е. Быстродействующие электроприводы постоянного
тока с ШИП. - Л.: Энергоиздат. 1986.
6. Копылов А.А. «Справочник по электрическим машинам» М.
. «Высшая школа» 1991 г.
8. Нормы амортизационных отчислений основных фондов. Введен
9. c l января 1997 г.
10. СНИП-4-6-82 - М.: Стройиздат, 1983
11. Князевский Б.А., Марусова Т.П., Чекалин Н.А. Охрана
труда в электроустановках: Учебник для вузов. - М.: Энергоатомиздат, 1983. -
336 с.
. Москаленко В.В. Электрический привод: Учеб. для
электротехн. спец. техн. - М.: Высш. шк., 1991. - 430 с.
. Лысов В.А., Поповьян Ф.Л., Нечаева Л.И. Охрана
окружающей среды: Учебное пособие. - Ростов н/Д: Рост. инж.-строит, ин-т, 1989.
14. ГОСТ
12.4.011-89 ССБТ. Средства защиты работающих. Классификация.
15. СанПин
2.2.4.548-96 Гигиенические требования к микроклимату производственных помещений
. СН
2.2.4/2.1.8.562-96 Шум на рабочих местах в помещениях жилых общественных зданий
и на территории жилой застройки.
. СН
2.2.4/2.1.8.566-96. Производственная вибрация, вибрация в жилых и общественных
зданиях
. СанПин
2.2.1/2.1.1.1278-03 Гигиенические требования к естественному, искусственному и
совмещенному освещению жилых и общественных зданий.
. СанПин
2.2.4.1191-03 Электромагнитное излучение.
. Правила
устройства электроустановок (ПУЭ). - М.; Атом издат, 2009
. ГОСТ
12.1.030-81 ССБТ. Электробезопасность. Защитное заземление. Зануление.
. Межотраслевые
правила по охране труда (правила безопасности) при эксплуатации
электроустановок. ПОТ РМ-016-2001, РД 153-34,0-03, 150-00.-М:» Изд-во НЦ ЭНАС»,
- 2001.-192 с.
. Справочник
проектировщика. Внутренние санитарно-технические устройства: вентиляция и
кондиционирование. /под редакцией И.Г. Староверова./-М.: Машиностроение, 1992
. ГОСТ
12.2.049-80 ССБТ Оборудование производственное. Общие эргономические
требования.
. Пайка
сборка ТИ РМ - (075-085) - 2001 Межотраслевые типовые инструкции по охране
труда для работников занятых проведением работ по пайке и лужению изделий
. ГОСТ
12.2.032-78ССБТ. Рабочее место, сидя и стоя. Общие эргономические показатели.
27. Дунаев М.П. Элементы систем автоматики. Методические
указания по выполнению лабораторных работ для студентов специальности 1804. -
Иркутск, 2004. - 37 с.