Респективная система передачи данных по технологии ZigBee
Введение
радиосистема беспроводной zigbee
На сегодня разрабатываются информационные, контрольные и
управляющие системы.
С одной стороны информация о текущем состоянии объекта, а с
другой стороны имеется возможность управления, подача сигналов которые изменяют
состояние объекта.
Основные вопросы, которые необходимо решать при
проектировании систем способы передачи, как контроля и управляющую информацию
на пульт контроля или оператору сигнализации.
Примерами могут служить состояния, контроль пожароопасности объекта
или мониторинга.
Развитие технической передачи сигналов приводит к
постепенному вытеснению проводных способов радиочастотными. В тоже время
проводные способы ориентированы на применение типичных интерфейсов ЭВС (RS-422, RS-485) которые показали
хорошую работоспособность и заслуживают внимания при проектировании новых
изделий.
Беспроводные каналы постепенно входят в ЭВС, расширяя
гибкость и мобильность последних, замечательным качеством радиоканала считается
не возможность его разрыва при сознательных нарушений связи использовании
дополнительных помех (приводит к ложным срабатываниям), что не выводит систему
из строя, система восстанавливается в короткое время. Возникает задача при
проектировании новых информационных систем на большое число точек контроля
выборе типа канала связи, но задача решается в рамках дипломного проекта.
Актуальность разработки контроллера охранной системы с
радиоканалом
Сегодня рынок насыщен разнообразными устройствами как
отечественного, так и зарубежного производства, обеспечивающими необходимое
сервисное обеспечение на основе микропроцессорного управления. Но эти системы,
как правило, очень дорогие, состоящие из множества различных блоков и с высокой
ценовой категорией.
На сегодняшний день большую популярность завоевала продукция
систем безопасности предприятия «BOLID». Но построение сетей на крупных объектах
зачастую не дает полноценное использование проводных интерфейсов связи, так как
существуют труднодоступные места в здании и между ними, для прокладки кабеля
телеметрии.
В данной работе рассматривается устройство, предназначенное
для интегрирования в системы безопасности. Контроллер охранной системы с
радиоканалом работает по технологии ZigBee имеет очень малое потребление электроэнергии,
что не маловажно для экономии на сегодняшний день. Возможность передать
информацию в обход при отказе соседнего устройства, что не нарушает
работоспособности всей сети. Имеющаяся помехозащищенность радиоканала позволяет
существенно увеличить дальность передачи.
Комбинированный прибор позволяет с помощью гибкой настройки
портов подключать различные типы датчиков, и систем управления, выполняющие
разнообразные функции.
Имеется возможность подключения внешних устройств оповещения,
идентификаторов (ключи Touch Memory, Proximity - карты, PIN - коды и т.д.) позволяют
организовать предоставления доступа, управлением и другими функциями.
Данное устройство при многочисленных возможностях имеет
невысокую стоимость, хорошо вписывается в бюджетный вариант небольших
предприятий, что важно для выполнения задачи управления и мониторинга объектов,
простоту в использовании.
1. Анализ технического задания
Обобщенная структура информационно - измерительных систем.
Различные виды структуры ИИС в зависимости от организации и
взаимодействия функциональных блоков: цепочечная, радиальная, магистральная с
централизованным и децентрализованным управлением, радиально-магистральная. Эти
варианты структур отличаются в основном организацией передачи информации. В
зависимости от организации сбора измерительной информации выделяются структуры:
одноканальная, многоканальная, мультиплицированная, многоточечная, сканирующая.
Мы не будем останавливаться на рассмотрении этих структур, поскольку при
современном уровне цифровой вычислительной техники все эти структуры с функциональной
точки можно рассматривать как частный случай обобщенной структуры, приведенной
на рисунке 1 [1].
Рисунок 1 - Управление исследуемым объектом
Исследуемый объект описывается физическими величинами х1…,
хn. Номенклатура измеряемых величин определяется заказчиком
(пользователем) ИИС, исходя из физических представлений об объекте. Эти
величины могут быть одинаковыми, например пространственные координаты. Среди
них могут быть однотипные, например электрические (напряжение, сила тока,
сопротивление и др.). Эти величины могут быть существенно различными, например
метеорологические показатели при мониторинге окружающей среды (температура
воздуха, атмосферное давление, влажность, направление и скорость ветра). Даже
при четко выраженной области применения ИИС измеряемые физические величины
могут быть различными [1].
Первичные измерительные преобразователи (ПИП), или датчики,
преобразуют величины xt в электрические величины yt (напряжение, ток,
сопротивление, емкость, индуктивность и др.). Датчики являются обязательными
компонентами ИИС. Вид датчика в первую очередь определяется видом преобразуемой
величины. Однако, как мы увидим ниже, для измерения одной и той же физической
величины могут использоваться различные первичные преобразователи, отличающиеся
принципом действия и своими характеристиками. Поэтому в рамках одной ИИС, если
даже преобразуемые величины одинаковы по физическому смыслу, первичные
преобразователи могут быть различными, в частности, в зависимости от требуемого
диапазона измерения. Например, шунты, являющиеся первичными преобразователями
силы тока в напряжения, будут иметь разное сопротивление для разных диапазонов
измерения. Диапазоны измерения силы тока могут отличаться на порядки. В силу
этого конструкция шунтов в различных каналах также будет различной [1].
Конструктивно вторичные преобразователи могут быть совмещены
с первичными преобразователями или выполнены в виде отдельных плат (устройств).
В состав вторичных преобразователей могут входить простейшие вычислительные
устройства, например для введения поправок или для линеаризации характеристик
(так называемые интеллектуальные датчики) [1].
Напряжения Ui поступают на аналого-цифровые преобразователи
(АЦП), где преобразуются в цифровые коды Сi подаваемые на ЭВМ. По
выполняемым функциям АЦП в принципе можно отнести к вторичным преобразователям,
что, как мы увидим ниже, реализуется иногда конструктивно. Однако они выделены
в отдельные функциональные блоки в силу следующих обстоятельств:
• АЦП, как это отражено на рисунке 2, в отличие от других
преобразователей, работают под управлением ЭВМ, обеспечивающей необходимый
алгоритм сбора первичной информации;
• АЦП, как и датчики, в отличие от других вторичных
преобразователей, являются обязательными компонентами каждого канала.
Рисунок 2 - АЦП в мультиплексном режиме
АЦП могут быть индивидуальными для каждого канала, однако
чаще один АЦП используется для всех или нескольких каналов, работая в
мультиплексном режиме (рисунок 2) [1].
Каналы связи между элементами ИИС могут иметь различный
характер. В простейшем случае для локально сосредоточенной ИИС это проводная
связь, в том числе внутри стойки или конструктива (крейта), где размещены сами
элементы. Для ИИС, распределенных в пространстве, могут использоваться
радиоканалы или волоконно-оптическая связь. В этих случаях один канал связи
может служить для передачи информации от разных первичных преобразователей,
если они локально сосредоточены, то есть каналы связи, как и АЦП, могут функционировать
в мультиплексном режиме [1].
Так например универсальный микропроцессорный вторичный
преобразователь регулятор-измеритель ОВЕН ТРМ1 предназначен для измерения и
регулирования температуры теплоносителей и различных сред в холодильной
технике, сушильных шкафах, печах различного назначения и другом технологическом
оборудовании, а также для измерения других физических параметров (веса,
давления, влажности и т. п.).
К его основным функциям можно отнести универсальный вход для
подключения широкого спектра датчиков температуры, давления, влажности,
расхода, уровня и т. п., цифровая фильтрация и коррекция входного сигнала,
масштабирование шкалы для аналогового входа, возможность управления трехфазной
нагрузкой (модификация по типу выхода с3), индикация текущих значений
измеренной величины или уставки на встроенном 4-х разрядном светодиодном
цифровом индикаторе, программирование кнопками на лицевой панели прибора,
сохранение настроек при отключении питания.
Пример АЦП для этих типов приборов - автоматические и
полуавтоматические преобразователи ОВЕН АС2, ОВЕН АС3, ОВЕН АС4 с интерфейсами
RS-232, RS-485 или USB. Максимальное количество каналов отображения для одного порта
составляет 256. Без использования средств усиления сигнала к преобразователю
АС3-М, АС3 или АС4 можно подсоединять до 32 приборов, с использованием
усилителя - до 256.
Последовательность преобразователей (ПИП, ВИП, если они есть,
и АЦП) и каналов связи, обеспечивающая преобразование измеряемой физической
величины в цифровой код, называется измерительным каналом (ИК). Другими
словами, измерительный канал - это вся совокупность технических средств,
преобразующих измеряемую величину в код, поступающий в ЭВМ. Как видно из
вышесказанного, общим для разных ИК могут быть АЦП, каналы связи и иногда вторичные
преобразователи [1].
Рассмотренная функциональная схема, как уже отмечалось,
включает в себя как частные случаи другие структурные схемы. При n = 1 мы получаем
одноканальную ИИС. Точечная ИИС, для которой все или некоторые величины хi одинаковы по физическому
смыслу и измеряются датчиками, размещенными в разных точках пространства,
вписывается в схему на рисунке 1 без каких-либо уточнений. Различные варианты
организации связи конкретизируют построение измерительных каналов, но не
изменяют функциональной структуры системы [1].
Информационно - измерительные системы применяют как
автономно, так и в составе различных автоматизированных комплексов, создаваемых
на основе интеграции ЭВС, а также средств связи [1].
Независимо от назначения и конкретного применения, общее
требование к ИИС состоит в том, что исходное аналоговое измерительное
сообщение, передаваемое от каждого источника (датчика), восстанавливается на
выходе (у адресата) с заданной точностью.
Если информация передается на большое расстояние или в
условиях сильных помех, передача - прием, включает выбор помехоустойчивых
методов кодирования - декодирования, модуляции - демодуляции [1].
Информационно - измерительных системах, где совокупность
функционально - связанных устройств наряду с измерением обеспечивает все
необходимое информационное обслуживание контролируемого объекта, включающий
автоматический сбор, представление, передачу, запоминание, регистрацию и
обработку измерительной информации. В случаях, когда передача данных
осуществляется по кабельной линии или радиолинии система является
телеметрической или радиотелеметрической [1].
В данном дипломном проекте рассмотрим несколько систем
передачи телеметрических данных, послуживших при проектировании аналогами создаваемой
системы передачи данных, например, такие как «Стрелец». К разрабатываемому
устройству будут подключаться датчики движения, задымления, открытие дверей и
датчики на разбитие стекла. Связь с датчиками осществляется по радиоканалу что
очень удобно при использовании прибора. Контроллер охранной системы с
радиоканалом будет работать как автоматизированная система интегрированная в
ЭВС.
1.1 Интерфейс
передачи данных RS-485
Интерфейс RS-485 - широко распространенный высокоскоростной и
помехоустойчивый промышленный последовательный интерфейс передачи данных.
Практически все современные компьютеры в промышленном исполнении, большинство
интеллектуальных датчиков и исполнительных устройств, программируемые
логические контроллеры наряду с традиционным интерфейсом RS-232 содержат в
своем составе ту или иную реализацию интерфейса RS-485 [2].
Интерфейс RS-485 основан на стандарте EIA RS-422/RS-485. К
сожалению, полноценного эквивалентного российского стандарта не существует,
поэтому в данном разделе предлагаются некоторые рекомендации по применению
интерфейса RS-485 [2].
Сигналы интерфейса RS-485 передаются дифференциальными
перепадами напряжения величиной (0,2…8) В, что обеспечивает высокую
помехоустойчивость и общую длину линии связи до 1 км (и более с использованием
специальных устройств - повторителей). Кроме того, интерфейс RS-485 позволяет
создавать сети путем параллельного подключения многих устройств к одной
физической линии (так называемая «мультиплексная шина») [2].
В обычном PC-совместимом персональном компьютере (не
промышленного исполнения) этот интерфейс отсутствует, поэтому необходим
специальный адаптер - преобразователь интерфейса RS-485/232 (рисунок 3) [2].
Рисунок 3 - Построение интерфейса RS-485
Преобразователь интерфейса ПИ-485/232 используется при
организации связи между устройствами, оборудованными интерфейсом RS-232, но
использующими в качестве среды передачи интерфейс RS-485.
Некоторые технические данные преобразователя ПИ-485/232:
взаимное «прозрачное» преобразование сигналов интерфейсов
RS-232 и RS-485 с гальванической изоляцией между ними;
управление направлением передачи осуществляется со стороны
RS-232 по сигналу RTS;
требует наличия сигнала DTR, используемого для питания
преобразователя (на стороне RS-232);
организация связи между различными устройствами, протокол
передачи которых использует полудуплексный режим (запрос и ответ передаются по
одной физической линии, но в разные промежутки времени);
индикация состояния сигналов интерфейса RS-232: RxD (прием),
TxD (передача), RTS (сигнал управления передачей);
максимальная скорость обмена - 19200 бит/с [2].
Грубо принцип управления направлением передачи
преобразователя ПИ-485/232 можно представить так (рисунок 4).
Рисунок 4 - Принцип передачи данных
Рисунок 5 - Линия связи
В качестве линии связи используется экранированная витая пара
с волновым сопротивлением ≈120 Ом (рисунок 5). Для защиты от помех экран
(оплетка) витой пары заземляется в любой точке, но только один раз: это
исключает протекание больших токов по экрану из-за неравенства потенциалов
«земли». Выбор точки, в которой следует заземлять кабель, не регламентируется
стандартом, но, как правило, экран линии связи заземляют на одном из ее концов
[2].
Устройства к сети RS-485 подключаются последовательно, с
соблюдением полярности контактов A и B:
Как видно из рисунка 6, длинные ответвления (шлейфы) от
магистрали до периферийных устройств не допускаются. Стандарт исходит из
предположения, что длина шлейфа равна нулю, но на практике этого достичь
невозможно (небольшой шлейф всегда имеется внутри любого периферийного
устройства: от клеммы до микросхемы приемопередатчика) [2].
Рисунок 6 - Подключение периферийных устройств
Качество витой пары оказывает большое влияние на дальность
связи и максимальную скорость обмена в линии. Существуют специальные методики
расчета допустимых скоростей обмена и максимальной длины линии связи,
основанные на паспортных параметрах кабеля (волновое сопротивление, погонная
емкость, активное сопротивление) и микросхем приемопередатчиков (допустимые
искажения фронта сигнала). Но на относительно низких скоростях обмена (до 19200
бит/с) основное влияние на допустимую длину линии связи оказывает активное
сопротивление кабеля. Опытным путем установлено, что на расстояниях до 600 м
допускается использовать кабель с медной жилой сечением 0,35 мм (например,
кабель КММ 2х0,35), на большие расстояния сечение кабеля необходимо
пропорционально увеличить. Этот эмпирический результат хорошо согласуется с
результатами, полученными расчетными методами [3].
Даже для скоростей обмена порядка 19200 бит/с кабель уже
можно считать длинной линией, а любая длинная линия для исключения помех от
отраженного сигнала должна быть согласована на концах. Для согласования
используются резисторы сопротивлением 120 Ом (точнее, с сопротивлением, равным
волновому сопротивлению кабеля, но, как правило, используемые витые пары имеют
волновое сопротивление около 120 Ом и точно подбирать резистор нет
необходимости) и мощностью не менее 0,25 Вт - так называемый «терминатор».
Терминаторы устанавливаются на обоих концах линии связи, между контактами A и B
витой пары. Преобразователь ПИ-485/232 уже имеет терминатор, и при
необходимости его можно включить установкой перемычки между контактами «T» и
«T» [3].
В сетях RS-485 часто наблюдается состояние, когда все
подключенные к сети устройства находятся в пассивном состоянии, т.е. в сети
отсутствует передача и все приемопередатчики «слушают» сеть. В этом случае
приемопередатчики не могут корректно распознать никакого устойчивого
логического состояния в линии, а непосредственно после передачи все
приемопередатчики распознают в линии состояние, соответствующее последнему
переданному биту, что эквивалентно помехе в линии связи. На эту проблему не так
часто обращают внимания, борясь с ее последствиями программными методами но,
тем не менее, решить ее аппаратно несложно. Достаточно с помощью специальных
цепей смещения создать в линии потенциал, эквивалентный состоянию отсутствия
передачи (так называемое состояние «MARK»: передатчик включен, но передача не
ведется). Цепи смещения реализованы в преобразователе ПИ-485/232, для их
подключения достаточно установить две перемычки между контактами «+V» и «+V»,»
- V» и» - V» соответственно. Для корректной работы цепей смещения необходимо
наличие двух терминаторов в линии связи [3].
В сети RS-485 возможна конфликтная ситуация, когда два и
более устройства начинают передачу одновременно. Это происходит в следующих
случаях:
в момент включения питания из-за переходных процессов
устройства кратковременно могут находиться в режиме передачи;
одно или более из устройств неисправно;
некорректно используется так называемый «мультимастерный»
протокол, когда инициаторами обмена могут быть несколько устройств [3].
В первых двух случаях быстро устранить конфликт невозможно,
что теоретически может привести к перегреву и выходу из строя
приемопередатчиков RS-485. К счастью, такая ситуация предусмотрена стандартом и
дополнительная защита приемопередатчика обычно не требуется [3].
В последнем случае необходимо предусмотреть программное
разделение канала между устройствами - инициаторами обмена, так как в любом
случае для нормального функционирования линия связи может одновременно предоставляться
только одному передатчику [3].
В данном дипломном проекте при разработке устройства был
предусмотрено размещение интерфецса RS-485 на приборе. Этот интерфейс наиболее подходит
для разрабатываемого устройства т.к он обеспечивает требуемую помехоустойчивость
и определенную длину линии связи, которая нам нужна для связи с помещением
охраны.
1.2 Принципы построения радиосистемы «Стрелец»
Далее вторым вариантом устройства рассмотрим внутриобъектовую
охранно-пожарную сигнализацию (ВОРС), использующая беспроводной интерфейс в
диапазоне 432 МГц (рисунок 7).
ВОРС Стрелец представляет собой распределенную радиосеть,
охватывающую охраняемый объект. Узлами такой сети являются приемно-контрольные
устройства - радиорасширители (РРОП, АСБ-РС, РРП-240). Один, из которых
программно назначается координатором сети [4].
Каждый радиорасширитель (РР) контролирует закрепленные за ним
дочерние радиоканальные устройства: извещатели охранные, пожарные,
исполнительные устройства, устройства управления и др. Вместе с дочерними
устройствами он формирует микросоту. Сетевая топология внутри каждой микросоты
- «звезда», в центре которой размещен радиорасширитель[4].
Радиорасширитель ретранслирует информацию от своих дочерних
устройств и других радиорасширителей по радиосети на координатор.

Рисунок 7 - Топология радиосистемы «Стрелец»
Координатор выполняет функции основного компонента системы,
на который стекается вся информация с остальных РР системы [4].
Координатор собирает информацию о состоянии всех устройств
радиосети и выполняет следующие операции:
• обработку и протоколирование информации;
• отображение состояния разделов с помощью средств индикации;
• передачу информации на устройства передачи извещений,
компьютер, релейные выходы и в сигнальные линии различных приемно-контрольных
приборов (ППКОП Аккорд-512 / Спектр-8, ППКП Радуга-2А/4А, Радуга-3/240) [4].
Координатор также получает команды от устройств управления, с
компьютера, либо внешнего приемно-контрольного прибора и, в случае
необходимости, передает управляющие команды дочерним устройствам и другим РР
радиосети[4].
При отсутствии дочерних РР координатор самостоятельно
выполняет функции радиоканального ППКОП с малым радиусом охвата, либо блока
радиоканального расширения проводного ПКП[4].
Таблица 1 - Варианты построения систем
|
Интеграция Устройства
|
Автономно или С ППКОП «Аккорд-512», «Спектр-8»
|
В составе ППКП «Радуга-2А/4А»
|
В составе ППКП «Радуга-3/240»
|
|
Координатор
|
РРОП
|
АСБ-РС
|
РРП-240
|
|
Устройства: дочерние РРОП маршрутизаторы
извещатели + детекторы исп. устр. + устр. упр. глоб. устройства Всего
|
15 16 512 (32х16) 256 (16х16) 16 784
|
15 16 1) 512 (32х16) 2) 256 (16х16) 16 784 4)
|
7 16 1) 128 (с РР) 2) 3) 128 (с РР) 3) - 128 (с РР) 3)
|
|
1) Состояние маршрутизатора не отображается на
ППКП Радуга-2А/4А/3/240. 2) В качестве извещателей могут быть использованы
ИП, РИГ и БУК-Р. 3) Адрес в СЛ «Радуга-3/240» может быть присвоен РР и
дочерним устройствам с номерами 1-32 (любого из 8 РР). Каждому устройству
соответствует свой адрес в СЛ. 4) На 64 адреса в СЛ. Каждому адресу в СЛ
соответствует локальный раздел.
|
Общие характеристики ВОРС «Стрелец» как ППКП В соответствии с
ГОСТ Р 53325-2009 ВОРС «Стрелец» является прибором приёмно-контрольным и
управления пожарным (ППКУП) со следующими характеристиками:
Таблица 2 - Основные характеристики ППКУП
|
Характеристика
|
Значение
|
|
По возможности адресного обмена информацией
между ППКП и другими техническими средствами пожарной сигнализации
|
адресный
|
|
По виду передаваемой информации о пожароопасной
ситуации в защищаемых помещениях между ППКП и другими техническими средствами
пожарной сигнализации
|
комбинированный
|
|
По информационной емкости (количеству
контролируемых шлейфов сигнализации или количеству контролируемых адресных
устройств)
|
большой информационной емкости (до 784 адресных
устройств)
|
|
По информативности (количеству видов выдаваемых
извещений)
|
большой информативности (25 видов извещений)
|
|
По объекту управления
|
для управления средствами оповещения,
установками дымогазоудаления, и другими устройствами в том числе устройствами
пожарной автоматики
|
|
По разветвленности (количеству коммутируемых
цепей, приходящихся на одну защищаемую зону)
|
большой разветвленности;
|
|
По возможности резервирования составных частей
|
без резервирования
|
|
По составу и функциональным характеристикам
|
с возможностью применения средств
вычислительной техники
|
|
По конструктивному исполнению
|
многокомпонентный
|
|
время технической готовности
|
не более 60 с
|
В последнее время упрощенный взгляд на живучесть систем
охранной и особенно пожарной сигнализации был пересмотрен. Теперь такие системы
обязаны сохранять работоспособность даже в случае выхода из строя части узлов и
линий связи[4].
Решить эту задачу помог опыт использования динамической
маршрутизации в телекоммуникационных сетях. Принципиальное отличие таких сетей
- «многосвязанность». Т.е. из одной точки в другую можно попасть по двум и
более маршрутам. Для управления такой сетью необходимы маршрутизаторы. Именно
они позволяют доставлять информацию даже при выходе из строя отдельных узлов и
каналов связи. В результате появляется достаточное количество резервных
обходных путей, и значительно повышается живучесть[4].
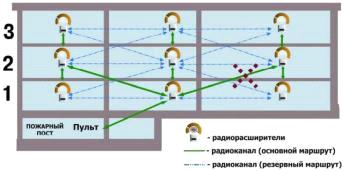
Рисунок 8 - Динамическая маршрутизация
В радиосистеме Стрелец реализованы принципы динамической
маршрутизации (рисунок 8) на уровне радиорасширителей. Т.е. при потере связи с
некоторыми радиорасширителями, система имеет возможность восстановить
нормальную работу оставшейся ее части, используя резервные каналы передачи
информации[4].
Каждое радиоустройство имеет собственный адрес,
идентифицирующий его в радиоэфире.
В системе с динамической маршрутизацией адрес радиоустройства
состоит из двух частей и имеет следующий вид: AA.bb.
«bb» - адрес дочернего устройства внутри ячейки. Значение «0»
используется самим радиорасширителем. Остальные устройства внутри ячейки
занимают адреса 1-63.
«AA» - адрес ячейки (радиорасширителя) в составе радиосети
Координатор радиосети имеет адрес «0». Остальные РР автоматически нумеруются
1-15. Маршрутизаторы нумеруются 16-31.
В статической структуре адрес ячейки имеет вид «AAAAA» и
дополнительно содержит информацию о промежуточных ячейках, через которые
осуществляется связь с координатором. Т.е. адрес содержит в себе «статический
маршрут» [4].
В рамках одной системы все радиооборудование объединяет
единый уникальный код радиосистемы. Этот код состоит из двух чисел, каждое из
которых находится в диапазоне 00-FF (шестнадцатеричный формат). Одно число
доступно для изменения пользователю, другое выбирается случайным образом при
создании системы[4].
Связь между устройствами в системе осуществляется по
двухстороннему радиоканалу.
Рабочий частотный канал определяется для всей системы в целом
и задается при программировании исходя из электромагнитной обстановки на
объекте[4].
Устройства ВОРС осуществляют автоматическую смену рабочего
канала при невозможности доставки извещений по основному каналу.
Устройства ВОРС проводят автоматическую подстройку рабочей
частоты [4].
Состояние связи со всеми радиоустройствами контролируется.
Радиоустройства передают контрольные сигналы (рисунок 9) на родительский РР.
Периоды передачи являются случайными со средними значениями, выбранными из
интервала: 7 с, 12 с, 32 с, 1 или 2 мин. Период передачи программируется
пользователем индивидуально для каждого радиоустройства[4].

Рисунок 9 - Контроль радиоканала
На каждую посылку дочернее устройство должно получить
подтверждение доставки - «квитанцию» от своего РР. Если радиоустройство не
получило «квитанцию», оно принимает дополнительные меры для обеспечения
доставки:
увеличение излучаемой мощность до 10 мВт (если была занижена
при автоматической регулировке);
увеличение частоты выхода в эфир;
смена частотного канала.
Время, которое отводится на решение проблем связи - период
контроля, который устанавливается для каждого радиоустройства при
программировании[4].
Если в течение периода контроля РР не получил сигналов от
дочернего устройства, РР формирует сигнал неисправности связи с конкретным
устройством[4].
Период контроля может принимать значения: 1.5, 3, 9 или 15
минут. Период контроля выбирается из расчета не менее трехкратного периода
передачи контрольных сигналов[4].
Для исключения возможности подмены радиоустройств и
несанкционированного вмешательства в ВОРС используется шифрование передаваемой
информации, а также специальный механизм динамической аутентификации,
основанный на использовании пар ключей[4].
В качестве аналога для разрабатываемого прибора радиостстема
«Стрелец» более подходит. В рамках дипломного проекта надо разработать более
надежное устройство, удобное при эксплуатации и понятное при использовании
потребителем, а также доступное по цене и экономическим показателям
потребителям.
1.3 Модуль беспроводной передачи данных по
технологии ZigBee
Третьим вариантом проекта рассмотрим разработку модуля
беспроводной передачи телеметрических данных в диапазоне частот 2,4 ГГц.
Технология
ZigBee
ZigBee - стандарт для набора
высокоуровневых протоколов связи, использующих небольшие, маломощные цифровые
трансиверы, основанный на стандарте IEEE 802.15.4-2006 для беспроводных
персональных сетей, таких как, например, беспроводные наушники, соединённые с
мобильными телефонами посредством радиоволн коротковолнового диапазона. Имя
бренда происходит от поведения медовых пчёл, после возвращения их в улей.
Технология определяется спецификацией ZigBee, разработанной с намерением быть
проще и дешевле, чем остальные персональные сети, такие как Bluetooth. ZigBee
предназначен для радиочастотных устройств, где необходима длительная работа от
батареек и безопасность передачи данных по сети.
Альянс ZigBee является органом,
обеспечивающим и публикующим стандарты ZigBee, он также публикует профили
приложений, что позволяет производителям изначальной комплектации создавать
совместимые продукты. Текущий список профилей приложений, опубликованных, или
уже находящихся в работе:
· Домашняя автоматизация
· Рациональное
использование энергии (ZigBee Smart Energy 1.0/2.0)
· Автоматизация
коммерческого строительства
· Телекоммуникационные
приложения
· Персональный, домашний и
больничный уход
· Игрушкиработает в
промышленных, научных и медицинских (ISM-диапазон) радиодиапазонах: 868 МГц в
Европе, 915 МГц в США и в Австралии, и 2.4 ГГц в большинстве стран в мире (под
большинством юрисдикций стран мира). Как правило, в продаже имеются чипы
ZigBee, являющиеся объединёнными радио- и микроконтроллерами с размером
Flash-памяти от 60К до 128К таких производителей, как Jennic JN5148, Freescale
MC13213, Ember EM250, Texas Instruments CC2430, Samsung Electro-Mechanics
ZBS240 и Atmel ATmega128RFA1. Радиомодуль также можно использовать отдельно с
любым процессором и микроконтроллером. Как правило, производители радиомодулей
предлагают также стек программного обеспечения ZigBee, хотя доступны и другие
независимые стеки.
Так как ZigBee может активироваться (то
есть переходить от спящего режима к активному) за 15 миллисекунд или меньше,
задержка отклика устройства может быть очень низкой, особенно по сравнению с
Bluetooth, для которого задержка, образующаяся при переходе от спящего режима к
активному, обычно достигает трёх секунд. Так как ZigBee большую часть времени
находится в спящем режиме, уровень потребления энергии может быть очень низким,
благодаря чему достигается длительная работа от батарей.
Основными областями применения технологии
ZigBee являются беспроводные сенсорные сети, автоматизация жилья («Умный дом» и
«Интеллектуальное здание»), медицинское оборудование, системы промышленного
мониторинга и управления, систем охранной сигнализации, а также бытовая электроника
и «периферия» персональных компьютеров.
Протоколы ZigBee разработаны для
использования во встроенных приложениях, требующих низкую скорость передачи
данных и низкое энергопотребление. Цель ZigBee - это создание недорогой,
самоорганизующейся сети с ячеистой топологией предназначенной для решения
широкого круга задач. Сеть может использоваться в промышленном контроле,
встроенных датчиках, сборе медицинских данных, оповещении о вторжении или
задымлении, строительной и домашней автоматизации и т.д. Созданная в итоге сеть
потребляет очень мало энергии - индивидуальные устройства согласно данным
сертификации ZigBee позволяют энергобатареям работать два года.
Способность к самоорганизации и
самовосстановлению, ячеистая топология, защищённость, высокая помехоустойчивость,
низкое энергопотребление и отсутствие необходимости получения частотного
разрешения делают ZigBee-сеть подходящей основой для беспроводной
инфраструктуры систем позиционирования в режиме реального времени.
Типовые области приложения:
Домашние развлечения и контроль -
рациональное освещение, продвинутый температурный контроль, охрана и
безопасность, фильмы и музыка.
Домашнее оповещение - датчики воды и
энергии, мониторинг энергии, датчики задымления и пожара, рациональные датчики
доступа и переговоров.
Мобильные службы - мобильные оплата,
мониторинг и контроль, охрана и контроль доступа, охрана здоровья и телепомощь.
Коммерческое строительство - мониторинг
энергии, HVAC, света, контроль доступа.
Промышленное оборудование - контроль
процессов, промышленных устройств, управление энергией и имуществом.
Существуют три различных типа устройств
ZigBee.
Координатор ZigBee (ZC) - наиболее
ответственное устройство, формирует пути древа сети и может связываться с
другими сетями. В каждой сети есть один координатор ZigBee. Он и запускает сеть
от начала. Он может хранить информацию о сети, включая хранилище секретных
паролей производства компании Trust Centre.
Маршрутизатор ZigBee (ZR) - Маршрутизатор
может выступать в качестве промежуточного маршрутизатора, передавая данные с
других устройств. Он также может запускать функцию приложения.
Конечное устройство ZigBee (ZED) - его
функциональная нагруженность позволяет ему обмениваться информацией с
материнским узлом (или координатором, или с маршрутизатором), он не может
передавать данные с других устройств. Такое отношение позволяет узлу львиную
часть времени пребывать в спящем состоянии, что позволяет экономить
энергоресурс батарей. ZED требует минимальное количество памяти, и поэтому
может быть дешевле в производстве, чем ZR или ZC.
Программное обеспечение разработано с
целью упрощения процесса построения небольших недорогих микропроцессоров.
Радиоразработки, используемые в ZigBee тщательно оптимизированы, чтобы достичь
низкой цены среди большого числа продукции этой линейки. Есть несколько
аналоговых каскадов, где возможно используются цифровые контуры.
Модуль
беспроводной передачи данных ZigBee
Существует большой ряд практических задач, в которых
требуется контролировать состояние некоторого множества датчиков или простых
исполнительных устройств, размещенных на относительно небольших расстояниях и к
которым затруднительно или нежелательно подводить проводные линии. Вот
некоторые примеры таких задач.
Система обеспечения безопасности здания или территории. В ней
есть датчики регистрации движения разного типа, видеокамеры наблюдения,
контролируется появление или уход посетителя или сотрудника, снабженного
радиоэлектронным пропуском.
Промышленное управление и мониторинг: сбор данных о
процессах, состоянии работы агрегатов и др.
Для решения таких задач предназначены беспроводные цифровые
сети, работающие по стандарту ZigBee. Это общее название набора протоколов
высокого сетевого уровня, использующих небольшие маломощные радиопередатчики,
основанные на стандарте IEEE 802.15.4, который описывает беспроводные
персональные вычислительные сети[5]. ZigBee нацелена на приложения, которым
требуется большее время автономной работы от батарей и высокая степень
безопасности при относительно небольших скоростях передачи данных. Основное
достоинство технологии ZigBee заключается в том, что она при относительно
невысоком энергопотреблении поддерживает не только простые топологии
беспроводной связи («точка-точка» и «звезда»), но и сложные беспроводные сети с
ячеистой топологией с ретрансляцией и маршрутизацией сообщений[5].
По-существу, сеть ZigBee - это распределенная,
самоорганизующуюся сеть множества датчиков (сенсоров) и исполнительных
устройств, объединенных между собой посредством радиоканала. Область покрытия
подобной сети может составлять от нескольких метров до нескольких километров за
счет способности узлов ретранслировать сообщения от одного элемента к другому.
Сегодня технология беспроводных сенсорных сетей является единственной
беспроводной технологией с большим временем автономной работы от батарей, с
помощью которой можно решить задачи мониторинга и контроля. Объединенные в
беспроводную сенсорную сеть датчики образуют территориально-распределенную
самоорганизующуюся систему сбора, обработки и передачи информации[5].
Трансиверы, отвечающие стандарту 802.15.4, могут
использоваться как самостоятельные устройства, если разработчику нужно
организовать связь «точка-точка» или «звезда». Для организации полноценной сети
ZigBee необходимо добавить микроконтроллер, в который должен быть загружен
набор управляющих программ, так называемый стек протоколов ZigBee, который
обеспечивает возможность самоорганизации и самовосстановления сети. Сеть сама
определяет оптимальный маршрут передачи данных, а 16-разрядная адресация
позволяет находиться в одной сети 65 тысячам устройств. Это бывает необходимым
при построении единых сетей на больших промышленных предприятиях. Дальность
связи в условиях прямой видимости между двумя устройствами может достигать
нескольких километров. Важным также является и тот факт, что данные в
ZigBee-сетях могут передаваться по цепочке устройств, своего рода эстафетой,
что в сочетании с развитыми средствами самонастройки сильно упрощает
развертывание сети на больших площадях. Стандарт также предполагает 128-битное AES-шифрование
данных, что позволяет использовать его в различных системах безопасности[7].
Государственная Комиссия по Радиочастотам РФ приняла в мае
2007 года решение о выделении физическим и юридическим лицам на территории РФ
полосы радиочастот 2400-2483,5 МГц для применения устройств малого радиуса
действия (ZigBee) с мощностью до 100 мВт. Использование указанных полос может
осуществляться без оформления отдельных решений ГКРЧ и разрешений на их
использование.
Стандарт ZigBee описывает все уровни, через которые проходит
поток передаваемой информации, начиная с физического уровня и заканчивая
уровнем поддержки профилей устройств. Нижние два уровня описываются стандартом
IEEE 802.15.4 и определяют физические параметры приемопередатчика, структуру
радиочастотной посылки, число адресуемых устройств, механизмы проверки и
подтверждения целостности принятых данных, процедуры оценки качества канала
связи и алгоритмы предотвращения коллизий. Уровни с третьего по шестой
описываются непосредственно спецификацией стека ZigBee. На этих уровнях
определяется, какими свойствами должны обладать устройства, входящие в сеть,
каким образом пакет информации передается от одного узла сети к другому, как
обеспечивается безопасность передачи информации, как новое устройство подключается
к сети и ее топология, какой узел в сети является главным, какой -
подчиненным[8].
В спецификации стека предусмотрены три типа устройств:
координатор, маршрутизатор и оконечное устройство. Координатор инициализирует
сеть, управляет ее узлами, хранит информацию о настройках каждого узла, задает
номер частотного канала и идентификатор сети PAN ID, а в процессе работы может
являться источником, приемником и ретранслятором сообщений. Маршрутизатор
отвечает за выбор пути доставки сообщения, передаваемого по сети от одного узла
к другому, и в процессе работы также может являться источником, приемником или
ретранслятором сообщений. Оконечное устройство не участвует в управлении сетью
и ретрансляции сообщений, являясь только источником / приемником сообщений[8].
Среди свойств ZigBee следует особо выделить поддержку сложных
топологий сетей (рисунок 10). В сложной сети данные от конечного узла могут
идти в центр сбора данных не только напрямую, но и через промежуточные узлы. За
счет этого дальность связи может быть весьма значительной, несмотря на короткий
радиус действия отдельных устройств. В сети может быть объединено до 65 тыс.
устройств, поскольку возможна 16-разрядная адресация узлов (216=65536).
В расширенном варианте разрядность адресов может быть расширена до 64 [9].

Рисунок 10 - Варианты топологии сетей ZigBee
Замечательной особенностью сети ZigBee является возможность
самовосстановления работоспособности сети в случае выхода из строя отдельных ее
узлов. Это свойство основано на том, что каждый узел следит за своими соседями,
постоянно обновляя маршрутные таблицы на основе оценки мощности принятых от них
сигналов. В результате при изменении пространственного расположения соседей или
выходе из сети одного из устройств вычисляется новый маршрут следования
сообщения. Это преимущество является исключительно важным в сетях,
функционирующих на промышленных объектах в жестких условиях эксплуатации при
наличии промышленных помех, а также в тех случаях, когда часть узлов находится
на движущихся объектах [10].
При разработке контроллера охранной системы с радиоканалом
предусмотрели также связь прибора по радиоканалу используя протокол ZigBee. Так как на сегодняшний
день ZigBee является наиболее перспективной технологией для построения
беспроводных сетей с небольшими объемами передаваемой информации и такой
протокол является наиболее подходящим для использования в разрабатываемом
устройстве.
.4
Краткое описание размещения контроллера на объекте
В многоэтажных зданиях, а также отдельно стоящих корпусах, и
между производственными, учебными помещениями необходима связь с другими
сегментами сети. Возникает проблема прокладки интерфейсного кабеля и защита его
от возгорания.
Для решения этой проблемы в помещении устанавливаем контроллер
связи, который с помощью проводных линий соединяется с различными датчиками
систем безопасности: датчики задымления (дымовые); инфракрасные датчики -
движения (объемные), на разбитие стекла, открытие дверей. Оповещатели звуковые
и световые устанавливают обычно на откосе окна или у входной двери с наружи
помещения. Данные проводные соединения образуют некий кластер, а контроллер по
радиоканалу имеет связь с другим аналогичным кластером, расположенного в
соседних помещениях или на другом этаже здания.
Один контроллер программируется координатором сети и с
помощью интерфейса RS-485 подключается к пульту управления и контроля, в помещении
охраны.
2.
Техническое проектирование
2.1
Описание структурной схемы
Структурная схема контроллер охранной системы с радиоканалом
представлена на рисунке 11.
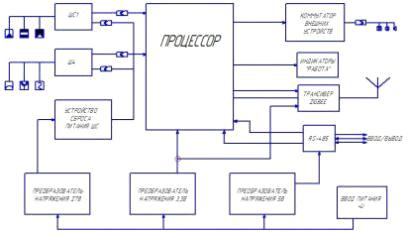
Рисунок 11 - Структурная схема устройства
Схема электрическая структурная устройства представлена в
графической части на формате А1.
Для объекта имеющего разветвленную структуру помещений, где
нет возможности прокладки кабельных трасс, возникает необходимость применения
модуля связи по технологии ZigBee сконфигурированный на работу в режиме
ретрансляции рисунок 11.
Универсальность данного прибора заключается в том, что любой
прибор установленный в любом месте программируется как ведущий и является
координатором сети.
Топология сети начинается с присвоения адреса контроллеру и
назначения функциональных возможностей.
С помощью интерфейса RS-485 координатор сети
подключается к пульту управления и контроля или компьютеру с соответствующим
программным обеспечением, расположенного на посту охраны. По данному интерфейсу
на пульт поступают сообщения с удаленных объектов, передаваемые по радиоканалу
методом ретрансляции (от одного к другому) с помощью модуля ТРАНСИВЕРА ZIGBEE.
Программное обеспечение процессора позволяет контролировать
шлейфы сигнализации ШС1 - ШС4, как в круглосуточном режиме так и по времени
установленным пользователем, в зависимости от конфигурации прибора.
Устройство сброса питания ШС дает возможность сброса дымовых
датчиков путем снятия питающего напряжения на 3 секунды.
Преобразователь напряжения генерирует напряжение 27 вольт
необходимого для питания датчиков сигнализации. Питание трансивера и процессора
подается с преобразователя 3,3 вольта, стабилизатор напряжения 5 вольт
запитывает усилитель интерфейса RS-485.
С помощью реле прибор управляет внешними исполнительными
устройствами такими как, светозвуковыми оповещателями, электромагнитными
замками, системой вентиляции и др.
По индикаторам «работа» определяется состояние контроллера:
зеленый свет - снят с контроля, красный - ШС на контроле, мигание с частотой 1
Гц тревога данного раздела.
Устройство ввода защищает прибор от переполюсовки по питанию.
Расстояние установки между приборами достигает до 100 метров
и зависит от количества стен и их толщины.
.2
Описание схемы электрической принципиальной
Знакомясь с описанием работы контроллер охранной системы с
радиоканалом, с её электрической принципиальной схемой необходимо установить: в
какой степени и насколько полно эти источники информации помогают выбрать
параметры; какие сведения отсутствуют; каким путем можно восполнить недостающие
сведения.
Схема электрическая принципиальная устройства представлена в
графической части на формате А1. Проводя анализ схемы электрической
принципиальной, нужно решить вопросы относительно вариантов конструкции
будущего устройства. Необходимо определить способ размещения печатных узлов,
величины напряжений и токов, действующих в устройстве, какие элементы схемы
вынести за пределы основного печатного узла.
В составе прибора имеются средства индикации, поэтому
конструкция должна иметь лицевую панель для размещения этих элементов. Также в
схеме имеются элементы коммутации для подключения внешних устройств, их будем
размещать на плате конструкции.
В данном устройстве применяются радиоэлементы имеющие малое
значение потребляемой мощности, следовательно, не требуются специальные
перфорационные отверстия для вывода лишнего тепла.
Описание принципа работы контроллера связи
Питание прибора осуществляется от внешнего источника питания
постоянного тока с номинальным напряжением 12 вольт (от 10,2 до 14,8 В).
Рекомендуется использовать резервированные источники питания «РИП-12» с
номинальным выходным напряжением 12 вольт.
Прибор четырех канальный, при постановке в режим
контроля-мониторинга, по каждому шлейфу, зависит от конфигурации шлейфа
сигнализации (далее ШС) протекает ток порядка 5-8 мА, АЦП начинает опрашивать
порты, к которым подключены ШС рисунок 12.
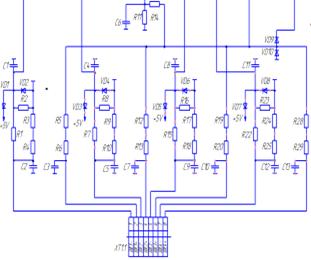

Рисунок 12 - Делители напряжения ШС, управление питанием + 27
В
Каждый канал имеет делитель напряжения, состоящий (рассмотрим
на примере ШС1) из резисторов R1, R2, R3, R4, для ограничения по току, который не должен превышать более
20 мА. Прибор обеспечивает ограничение тока протекающего через сработавший
датчик. Диоды VD1, VD2 являются защитой порта по напряжению. Конденсаторы С1, С2
сглаживают пульсацию высокочастотных помех. Датчики питаются напряжением +27
вольт через делители R5, R6. Управление питания (+27В) ШС собрано на ключах VT1, VT2 необходимого для сброса
датчиков в исходное рабочее состояние. Также в схеме имеется делитель
напряжения собранный на резисторах R11, R14 необходимый для обратной связи и контроля
питания. При нарушении шлейфа ток уменьшается менее 3мА или увеличивается более
10 мА, контроллер DD1 рисунок 13, выдает «тревогу» через интерфейс SPI и радиоканальный модуль
А1 сигнал тревоги с помощью соседних приборов, работающих в режиме
ретрансляции, достигает пульта охраны, интегрированной системы «Орион».
Одновременно на портах РС5, РС6 DD1 появляются сигналы управления оптоэлектронных
реле (рисунок 14) U1, U2, запрограммированных индивидуально для каждого типа тревог.
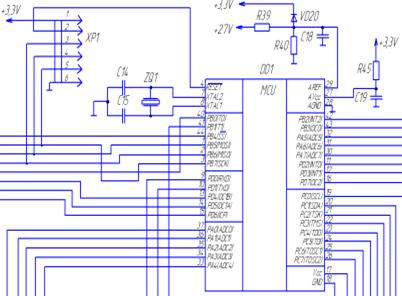
Рисунок 13 - Контроллер управления
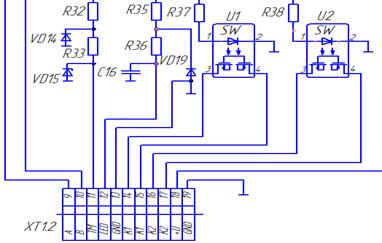
Рисунок 14 - Оптоэлектронное реле, цепи управления прибором
В цепях индикации ШС рисунок 15 используются двухцветные
светодиоды VD25-VD28, выведенных на лицевую панель прибора. Красное свечение
индикаторов «1-4» означают режим контроля, а при сработавшем ШС индикатор
вспыхивает с частотой 1 Гц. Звуковой встроенный оповещатель BF1 управляемый ключом VT3 издает прерывистый
сигнал тревоги. Контроль прибора в сети контролируется светодиодом VD24, также выведенного на
лицевую панель прибора. Зеленое свечение индикаторов «1-4» означает снятое
состояние прибора с контроля.
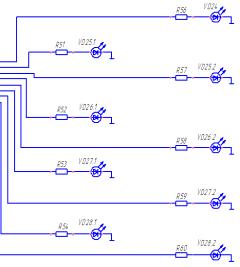
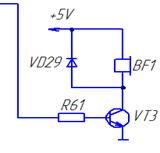
Рисунок 15 - Цепи индикации, звуковой оповещатель
Возможность управления прибором ключами - Touch Memory (1-Wire, µ-LAN), Wiegand или интерфейс магнитных
карт ABA TRACK II дает возможность применения в системах контроля
доступа. Цепи защиты VD14, VD15 и делитель напряжения на резисторах R32, R33 (рисунок 14) позволяют
организовать однопроводной интерфейс для считывания кодов ключей доступа.
Емкость памяти кодов ключей (PIN кодов) составляет 2048.
Напряжения питаний +3,3 и +27 (рисунок 16) вольт осуществляется
с помощью универсального импульсного SMPS контроллера DA4, DA5 для преобразователей
постоянного напряжения в постоянное (DC/DC) с рабочим диапазонном от 3В до 40 В,
максимальным выходной ток до 1,5 А. Стабилизатор DA3 с защитным диодом VD21 от переполюсовки и
фильтрами питания С20, С25 и С17, С23 от высокочастотных помех питает диодные
цепи защиты одновременно микросхему DA2 цепи питания +5 вольт.

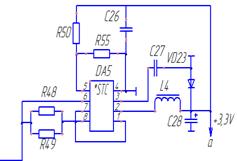
Рисунок 16 - Преобразователи напряжений
Наличие интерфейса RS-485 позволяет эффективно использовать прибор
координатором сети, подключенного к интегрированной системе охранно-пожарной
сигнализации и контроля доступа.
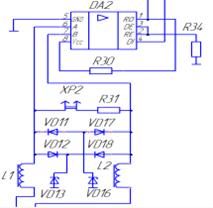
Рисунок 17 - Усилитель UART
Универсальный асинхронный приемопередатчик (UART) позволяет установить
прибор на расстоянии до 1500 метров от поста охраны. Кабель интерфейса «RS-485» подключается к
точкам «А, В» клеммы XT 1.2, сигнал которого через помехозащитные
дроссели L1,
L2 и диоды защиты VD11, VD12, VD17, VD18, VD13, VD16 поступает на входы
усилителя (рисунок 17) приемопередатчика DA2, c выходов которого сигнал
поступает на порт UART микросхемы DD1. Для гашения стоячих волн в линии, предусмотрен
резистор R47,
который подключается джемперной перемычкой с помощью разъема XP2
Отслеживание правильности действий доступа позволяет
светодиод считывателя, подключенный к порту контроллера через цепи защиты на
элементах C16,
R35, R36 и защитного диода VD19 (рисунок 14).
Если в момент формирования сообщения прибор не имел связи с
сетевым контроллером, то событие будет храниться в энергонезависимом буфере
памяти DD2 (EEPROM) - 1023 события, и при восстановлении связи по интерфейсу будет
передано в сетевой контроллер с указанием времени и даты его возникновения.
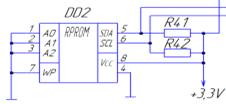
Рисунок 18 - Буфер памяти
Возможность подключения внешних приборов оповещения и
управления контролем доступа позволяют оптоэлектронные реле U1, U2 выходы которых
подключены клеммам XT 1.2 выводы К1, К2 (рисунок 14).
На входе опорного напряжения АЦП расположен делитель
напряжения R39,
R40, диод VD20 обеспечивает защиту
порта, питание АЦП подается через резистор R45 и фильтр С19.
Разъем программирования ХР1 (рисунок 13) подключенный к
интерфейсу SPI позволяет запрограммировать контроллер DD1, а также помощью
интерфейса SPI подключается модуль приемопередатчика по технологии ZigBee.
Описание
работы модуля MO-CC2420-Z
Модуль А1 (рисунок 19) работает в диапазоне 2.4 ГГц IEE 802.15.4 совместимый
трансивер RF модуль, предназначенный для маломощных и низковольтных
беспроводных приложений.
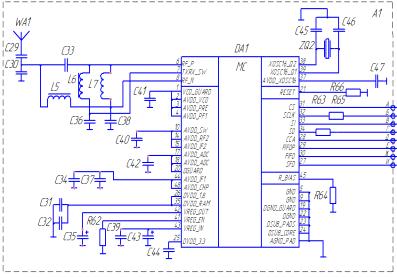
Рисунок 19 - Модуль трансивера MO-CC2420-Z
MO-CC2420-Z на основе высокопроизводительных микросхемах
СС2420 Chipcon`S.
СС2420 обеспечивает широкую поддержку аппаратных средств для обработки пакетов,
буферизации данных, передачу, шифрование данных и аутентификации данных, четкую
оценку канала, ссылки указанием качества и сроков пакетов информации. Эти
функции снижают нагрузку на хост-контроллер и позволяет собрать интерфейс из
недорогих контроллеров работающих по технологии ZigBee.
Характеристика:
- однокристальный 2.4 ГГц IEEE 802.15.4
совместимый RF приемопередатчик с полосы модем и MAC поддержки;
- DSSS полосы модем с 2 Mchips / с и 250кбит
/ с эффективной скоростью передачи данных;
- низкий ток потребления;
- 2,4 ГГц IEEE 802.15.4 совместимый
трансивер RF;
- рабочее напряжение в 2 ~ 3,6;
- доступные частоты: 2,4-2.483GHz;
- программируемая выходная мощность;
- 128 (RX) + 128 (TX) байт буферизации
данных;
- цифровой RSSI / LQI поддержки;
- оборудование MAC шифрования (AES-128);
- контроль батареи[11].
Описание контактов модуля в таблице 3.
Таблица 3 - Таблица контактов модуля MO-CC2420-Z
|
№ Контакта
|
Наименование
|
Тип
|
Описание
|
|
1
|
VCC
|
power
|
2 ~ 3.6V питания
|
|
2
|
GND
|
GND
|
GND
|
|
5
|
FIFO
|
Digital I/O
|
ввод /вывод данных в тестовом режиме
|
|
6
|
CSn
|
Digital Input
|
выбор кристала
|
|
7
|
SO
|
Digital Output
|
SPI выход, обновление отрицательного SCLK тремя
состояниями при высоком уровне CSn
|
|
8
|
SI
|
Digital Input
|
ведомый вход, отбирается по положительному
фронту SCLK
|
|
9
|
SCLK
|
Digital In
|
тактовый вход, до 10 МГц
|
|
10
|
CCA
|
Digital In
|
очистка канала / цифровой выход мультиплексора
|
|
11
|
SFD
|
Digital Out
|
делитель начало кадра
|
|
12
|
FIFOP
|
Digital I/O
|
превышение числа байт в FIFO превышает порог /
тактовые RF выхода
|
Принцип работы трансивера CC2420
CC2420 особенности ПЧ приемника. Полученный RF сигнал
усиленный низкошумовым усилителем (LNA) и понижающего преобразования в
квадратуре (I и Q) в промежуточных частотах (ПЧ). В IF (2 МГц), в комплексе I /
Q сигнал фильтруется и усиливается, и затем оцифровывается АЦП. Автоматический
контроль, окончательного канала фильтрации, соотношение символа и байт
синхронизация осуществляется в цифровом виде[11].
Когда выход SFD активный, это указывает, что обнаружено
начала кадра разделения. CC2420 буфер получения данных в 128 байт через FIFO.
Пользователь может читать через вход FIFO, по SPI интерфейсу[11].передатчик на
основе прямого преобразования. Данные в буфере 128 байт передаются по FIFO.
Преамбула и начало кадра разделяются аппаратным обеспечением. Каждый символ (4
бита) распространяется использованием IEEE 802.15.4 распространения
последовательности до 32 чипов и вывод на цифро-аналоговом преобразователя
(ЦАП) [11].
На аналоговый фильтр нижних частот проходит сигнал для
квадратурной (I и Q) конвертируется смесителем. ВЧ-сигнал усиливается
усилителем мощности (PA) и подается на антенну[11].
Цифровая полоса включает в себя поддержку кадра обработки,
адрес привязки, данные MAC безопасности. Четырехпроводной последовательный SPI
интерфейс используется для конфигурации и буферизации данных [11].
Транссивер CC2420 наиболее подходит для устройства и
соответствует характеристикам прибора которые указаны в техническом задании.
2.3
Расчеты на потребляемую мощность, нагрузочную способность
Расчет проведем по наиболее загруженным элементам, т.е.
работающих с максимальным потреблением тока.
Из справочных данных [12] выбраны мощности потребления у
следующих элементов:
ATmega32-16PU - (Рпот=0,0055Вт)
МО-СС2420 Z - (Рпот=0,066Вт)
AT24C512 - (Рпот=0,025Вт)
МС33063A - (Рпот=0,16Вт)
KAA - 3528ESGC - (Рпот=0,512Вт)
CLM1C-WKW-CVa6Wb153 - (Рпот=0,064Вт)
ADM1485 - (Рпот=0,9Вт)
CPC1117N - (Рпот=0,35Вт)
Рпот ШС ×4=0.9
Вт
Просуммировав все значения, получаю полную мощность
потребления контроллера связи не более 3Вт.
Таким образом, мощность, потребляемая устройством, не
превышает значения, указанного в техническом задании (3 Вт).
3.
Разработка конструкции
3.1
Варианты компоновки блоков
При анализе исходных данных произвожу сопоставление целей,
принципов, параметров, характеристик задуманной конструкции с теми, которые
имеются в техническом задании. Этих данных естественно не достаточно, для
выполнения проектных задач, поэтому следует выяснить: что не хватает, что можно
придумать, что можно взять у прототипа. Известно, что любое изделие (прибор), с
одной стороны, можно характеризовать такими параметрами: структура (состав),
форма, поверхности, размеры, материалы.
Структура должна определять состав конструкции, назначение и
способ механических соединений конструктивно законченных частей, из которых
будет состоять контроллер связи.
Форма определяет объем, часть пространства, занимаемую
устройством, расположение на рабочем месте, устойчивость закрепления.
Поверхности - определяют форму контроллера связи, его внешний вид, защиту от
внешних воздействий, места размещения органов индикации и коммутации[13].
Размеры - определяют количественные характеристики объема
конструкции, массы, расхода материала, прочности[14].
Материал - определяет сложность, стоимость, способ
изготовления, механические и физические характеристики корпуса контроллера
связи[14].
С другой стороны, электронное устройство с точки зрения
обеспечения функционального назначения и электронного принципа действия должно
обладать: средствами отображения обрабатываемой информации; органами управления
и регулирования для участия человека; средствами электрического соединения
прибора с внешними электрическими цепями такими, как питание постоянным током,
соединение с персональным компьютером, с помощью проводов и кабелей.
Средства индикации - определяют количество информации,
предъявляемое человеку, быстроту, удобство, безошибочность ее восприятия[14].
Электрические соединители - удобство, простота, надежность
электрического соединения устройства с внешними цепями[14].
Герметичность характеризует защиту от влаги, тепловых и
механических воздействий[14].
В соответствии с техническим заданием темой проекта является
разработка конструкции контроллер охранной системы с радиоканалом. Контроллер
состоит из узла индикации, узла коммутации, микроконтроллера, трансивера ZigBee, преобразователей
постоянного тока, буфера памяти и оптоэлектронных реле. Прибор относится к
стационарной аппаратуре. Условия работы должны соответствовать условиям работы
контроллера в нерегулярно отапливаемых помещениях (объемах). Рабочие
температуры от минус 0 до плюс 40°С. Максимальная относительная влажность
воздуха 98% при температуре плюс 25°С. Контроллер связи должен выдерживать
вибрации и ударные нагрузки, воздействующие при транспортировке, случайном
падении и т.п.
Для контроля и охраны объектов используются датчики
промышленного образца, а также для контроля и управления доступом применяются
стандартные устройства. Датчики и другие приборы, соединяются с контроллером
гибким кабелем.
Использование контроллера связи предусматривает компоновку и
габариты исходя из размеров и расположения других комплектующих устройства, а
также удобства в эксплуатации, поэтому габаритные размеры 157.8´95.5´53 мм.
Из анализа условий эксплуатации следует, что выбор
радиоэлементов должен обеспечивать работу контроллера в заданных условиях без
снижения надежности.
Разрабатываемая конструкция устройства должна быть
технологична.
3.2
Варианты компоновки конструкции
Сложность современной ЭВА требует того, чтобы наряду со
структурными, электрическими схемами были приведены и компоновочные эскизы. Для
данного устройства возможно несколько вариантов компоновки.
Каждый из представленных вариантов имеет свои достоинства и
недостатки. Расположение и ориентация плат и других конструктивных элементов в
заданном объеме контроллера, имеющих электрическое соединения в соответствии с
принципиальной схемой. Поэтому представленные варианты компоновки и должны быть
рассмотрены в соответствии изложенным выше. Чтобы выбрать оптимальный вариант
компоновки, необходимо учесть условия применения и эксплуатации, удобство
эксплуатации, обеспечение высокой ремонтопригодности, защиты от внешних и
внутренних воздействий.
Если взять за критерий выбора массогабаритные показатели, то
наиболее оптимальным будет вариант с горизонтальным расположением плат, но
данный способ компоновки не обеспечивает хорошего доступа ко всем узлам
устройства, а также увеличиваются габариты устройства. Кроме того, не
обеспечивается циркуляция воздуха, так как платы не дают возможности
перемещаться вверх нагретому воздуху. Если имеются наклонные плоскости корпуса,
то становится нецелесообразным расположение плат в горизонтальной плоскости,
так как будет невысоким коэффициент заполнения объема корпуса[15].
Компоновка с вертикальным расположением плат с точки зрения
оптимального теплового режима наиболее предпочтительна, так как создаются
идеальные условия для циркуляции воздуха (если расстояние между платами более
10 мм). Недостатком данного способа компоновки является невысокая
ремонтопригодность, невозможность легкого доступа к элементам, расположенных
внутри пакета плат. Наиболее предпочтителен вариант с применением поворотных
панелей. При этом ремонтопригодность увеличивается, а тепловой режим приближен
к оптимальному, но усложняется конструкция устройства[15].
Проектируемый контроллер не предъявляет к себе высоких
требований по критериям функциональной сложности, эксплуатационным требованиям,
но накладываются некоторые ограничения климатическими условиями ввиду того, что
прибор предназначен для эксплуатации в лабораторных, капитальных жилых и других
подобного типа помещениях (объемах). В ходе проектирования рассматривались
следующие варианты конструкции корпуса.
Конструкция, представленная, на рисунке 20 имеет ряд
достоинств и недостатков. Достоинства этой конструкции - легкость изготовления,
простота конструкции и простота сборки. Недостатки - наличие острых углов,
средний уровень эргономики.
Также была рассмотрена конструкция, представленная на рисунке
21. Достоинства этой конструкции - привлекательный внешний вид. Главным ее
недостатком стал невысокий уровень эргономики: т.к. прибор эксплуатируется под
углом лицевой панелью, неудобен для оператора.
Конструкция, представленная на рисунке 22, имеет следующие
достоинства - привлекательный внешний вид и высокий уровень эргономики.
Недостатки конструкции: сложная форма корпуса, в результате
небольшая увеличенная стоимости изготовления.
Проанализировав все три вида, было принято решение использовать
конструкцию под рисунком 22, так как контроллер, изготовленный по данной
конструкции, будет обеспечивать высокую эргономичность корпуса и простоту
сборки[16]. Достоинством вертикального расположения является то, что контроллер
может быть установлен на стене помещения. Расположение отверстия и клемм с боку
обеспечивает удобное подключение внешних устройств.
3.3
Разработка печатной платы
Размеры печатной платы, если они не оговорены в техническом
задании, определяются исходя из площади, необходимой для размещения всех
радиоэлементов, элементов печатного монтажа и площади дополнительных зон.
При компоновке элементов на печатных платах оперируют
понятием установочной площади элемента, которую для большинства элементов
вычисляют по формуле:
 (3.1)
(3.1)
L - длина элемента, включая отформованные выводы, мм.
Установочные площади элементов основной печатной платы
представлены в таблице 4.
Таблица 4 - Установочные площади элементов
|
Обозначение
|
Кол-во, шт.
|
В, мм
|
L, мм
|
S уст., мм2
|
|
А1
|
1
|
20
|
23
|
598
|
|
BF1
|
1
|
15
|
15
|
292,5
|
|
С2, С3, С5, С7, С9, С10, С12, С13, С16
|
9
|
1,6
|
3,2
|
40,5
|
|
С1, С4, С6, С8, С11, С14, С15, С17─С19,
С22─С24, С26, С27
|
15
|
0,8
|
1,6
|
19,2
|
|
С20, С25
|
2
|
4,3
|
7,3
|
83,2
|
|
С21, С28
|
2
|
8
|
8
|
32
|
|
DA2, DA4, DA5
|
3
|
5
|
6
|
117
|
|
DA3
|
1
|
6,6
|
9,5
|
62,7
|
|
DD1
|
1
|
11.75
|
11.75
|
30.55
|
|
|
|
|
|
|
DD2
|
1
|
5
|
8,8
|
57,2
|
|
L1, L2
|
2
|
5
|
5
|
65
|
|
L3, L4
|
2
|
1.6
|
3,2
|
13,65
|
|
R1, R3─R7, R9, R10, R12, R13, R15, R17─R20, R22, R24, R25, R28, R29, R32, R33, R35, R36, R43, R44, R48, R49
|
28
|
1,6
|
3,2
|
163,8
|
|
R2, R8, R11, R14, R16, R21, R23, R26, R27, R30, R31, R34, R37─R39, R40─ R42, R45─R47,
R50, R51─R61
|
33
|
0,8
|
1,6
|
54,91
|
|
U1, U2
|
2
|
4
|
6
|
62,4
|
|
VD1─VD12, VD14, VD15, VD17─ VD19, VD29, VD24
|
19
|
1,5
|
3,3
|
70,2
|
|
VD13, VD15, VD16, VD20, VD22, VD23
|
6
|
2
|
5
|
65
|
|
VD25─VD28
|
4
|
2,8
|
3,5
|
50,96
|
|
VD21
|
1
|
2,7
|
3.5
|
12,28
|
|
VT1─VT3
|
3
|
3
|
3
|
35,1
|
Краевое поле платы равно 5 мм
Полная площадь платы:
 (3.2)
(3.2)
где КS - коэффициент увеличения платы,  =(1,5…3);
=(1,5…3);
N - количество компонентов на плате;
Sкп - полей платы, мм2.
Увеличение площади печатной платы проводят с целью уменьшения
тепловых электромагнитных воздействий элементов друг на друга, обеспечения
возможности прокладки всех трасс.
Sпк =2100мм2
Sпк =2,7×3023 +2100 =10262,1мм2
Исходя из полученных значений площади платы и в соответствии
с ГОСТ 10317-79 «Платы печатные. Основные размеры» задаю конкретные габаритные
размеры основной печатной платы 90×145мм.
Компоновка элементов показана на рисунке 23.
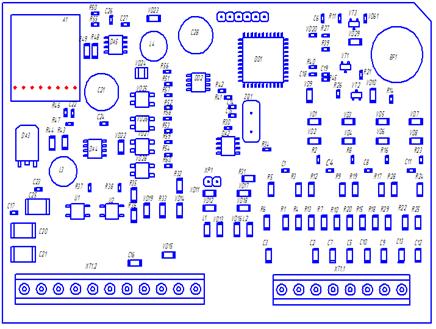
Рисунок 23 - Компоновка элементов на печатной плате
Под компоновкой РЭС понимают часть процесса конструирования,
связанного с размещением на плоскости или в объеме отдельных составных частей
изделия с учетом реализации необходимых электрических связей, взаимного влияния
электромагнитных и тепловых полей. При компоновке ПП электрорадиэлементы обычно
заменяют их установочными моделями, которые представляют собой проекцию
элемента на плату[17].
3.4
Описание требований к печатной плате
В современной радиоэлектронной аппаратуре наиболее
распространенным методом создания электрических цепей является печатная плата.
Печатные платы - элементы конструкции, которые состоят из
плоских проводников в виде участков металлизированного покрытия, размещенных на
диэлектрическом основании и обеспечивающих соединения элементов электрической
цепи. [18]
Преимущества:
Увеличение плотности монтажа и возможность
микроминиатюризации изделий.
Унификация и стандартизация конструктивных и технологических
решений.
Стабильность и повторяемость электрических характеристик
(проводимость, паразитные емкости, индуктивность).
Увеличение надежности и повышение качества.
Улучшение механических и прочностных характеристик.
Возможность применения современных методов автоматизации и
механизации монтажных, сборочных, контрольных и регулировочных работ.
Снижение трудоемкости, себестоимости и материалоемкости. [18]
Недостатки:
Ограничения по ремонту.
Затруднения возможности изменения конструкции.
Элементы печатных плат по ГОСТ 23752-86
Требования к печатным платам:
. Диэлектрические основания должны быть однородными по цвету,
монолитными по структуре, не иметь пузырей, раковин, сколов, трещин и
расслоений.
. Проводящий рисунок должен быть четким, с ровными краями,
без вздутий, разрывов, отслоений, подтравливания, следов инструмента и остатков
технологических материалов.
. Для повышения коррозионной стойкости и паяемости наносится
электролитическое покрытие, которое должно быть без разрывов, подгаров и
отслоений. При наличии на проводниках критических дефектов допускается
дублировать их объемными, но не более 5 для плат 120х180 и 10 проводников для
плат свыше 120х180.
. Монтажные и фиксирующие отверстия должны отвечать
требованиям чертежа.
. Для повышения надежности паяных соединений внутреннюю
поверхность монтажных отверстий должен покрывать слой меди не менее 20..25 мкм.
Слой должен быть сплошным, без включений, мелкокристаллической структуры, а
также должен обладать хорошим сцеплением с поверхностью.
. Должен выдерживать ток 250 А/м2 в течении 3
секунд, нагрузку на контакты до 1.5 Н и выдерживать 4 перепайки (для
многослойных печатных плат - 3 перепайки) без изменения внешнего вида, подгаров
и отслоений.
При недопустимом повреждении металлизированные отверстия
допускается восстанавливать с помощью пустотелых заклепок не более 2% от общего
количества отверстий и не более 10 штук на печатную плату.
. При циклическом воздействии температуры допускается
изменение сопротивления не более чем на 10%.
. Контактные площадки не должны иметь разрывов при сверлении
и оставаться гарантированный поясок 50 мкм.
. Сопротивление изоляции не должно быть менее 30 000 МОм при
Т=25 0С, влажности 46..84%, давлении 96..100 КПа, при расстоянии
0.2..0.4 мм между проводниками.
. Электрическая прочность 700 вольт в нормальных условиях и
500 вольт после воздействия в течении 2 суток Т=40 0С и влажности 90..96%.
. Деформация печатных плат при толщинах 1,5..3 мм на 100 мм:
для многослойных печатных плат (МПП) - 0,4.. 0,5 мм
для двусторонних печатных плат (ДПП) - 0,5.. 0,9 мм
. При воздействии на печатную плату Т=260..290 0С в течении
10 секунд не должно быть разрывов проводников и отслоений [18].
3.5
Описание сборочного модуля
Так как нам необходима небольшая высота устройства, то мы
выберем горизонтальное расположение печатной платы. Длинна и ширина большого
значения не имеют, остановимся на малой ширине, таким образом, устройство будет
выглядеть так на рисунке 24.
Рисунок 24 - Расположение печатной платы в корпусе
3.6
Описание корпуса
Корпус устройства должен выполнять ряд функций: обеспечивать
механическое крепление составных частей изделия, защищать элементы конструкции
от внешних климатических и механических воздействий. Кроме того, к конструкции
корпуса предъявляется ряд требований: малые массогабаритные показатели,
технологичность изготовления, легкость при сборке и монтаже элементов,
ремонтопригодность.
Виды корпусов:
корпуса для РЭА пластиковые (пластмассовые) из материалов -
поликарбонат, ударопрочный ABS пластик, негорючий ABS пластик. Степень защиты
от IP54 до IP65.
корпуса для рэа алюминиевые, литые (силуминовые):
герметичные, экранированные, с защитой от электромагнитных и радио помех.
Герметизация от IP54 до IP65.
Выбираем готовый ударопрочный пластиковый корпус из ABS-пластика стандарта UL-94-HB, так как он дешевый и
подходит нам по массогабаритным показателям.
Корпус контроллера охранной системы с радиоканалом состоит из
двух частей, крышки и основания, которые механически крепятся друг к другу.
При взаимодействии с РА восприятие информации человеком
производится с помощью органов чувств, являющихся для неё входом. Наиболее
задействованными в этом случае являются: зрительный, слуховой и тактильный
анализаторы.
При работе человека-оператора с РЭС основное количество
информации поступает к нему через зрение способность человека зрительно
воспринимать информацию характеризуется полем зрения обоих глаз, остротой
зрения, аккомодацией (способностью фокусирования хрусталика), адаптацией
(способностью изменять чувствительность глаза в зависимости от уровня
освещённости), конвергенцией (нацеливанием глаз на одну точку с помощью
совместного воздействия глазных мышц и хрусталика при переводе взгляда),
цветовым восприятием. Зона оптимального зрения находится в пределах отклонения
по 15° от оси зрения во все стороны. Несмотря на сравнительно небольшие пределы
этой зоны, лицевая панель контроллера, имеющего максимальную ширину 157.8 мм и
находящаяся на расстоянии 500…600 мм от глаз человека, целиком попадают в
оптимальную зону зрения [19].
При компоновке передней панели необходимо решить ряд задач:
осуществить группировку элементов лицевой панели (индикатора,
кнопок, разъемов, а также соответствующих им надписей и символов);
- расположить группы элементов с учетом
требований эргономики и инженерной психологии;
- отработать композиционное и художественно-стилевое решение
панели.
При компоновке групп на лицевой панели необходимо учитывать
следующие рекомендации:
наиболее значимые, ответственные группы, располагают в
центральной зоне панели;
траектория движения рук оператора должна быть плавной,
предпочтительно по одной линии или по кругу;
наиболее значимые регулировки должны осуществляться правой
рукой [19].
Все элементы, входящие в изделие крепятся на печатную плату.
Элементы, которые обеспечивают коммутацию с внешними приборами, крепятся на
печатную плату, но трассировка выполнена таким образом, чтобы обеспечить
крепление без контакта с корпусом. Основаниекорпуса изготавливается из того же
материала, что и крышка, в данном случае применен ABS-пластик, цвет черный,
нам только надо доработать корпус и сделать необходимые монтажные отверстия.
3.7
Описание конструкции изделия
Разрабатываемое устройство относится к стационарному типу аппаратуры.
Климатические и механические воздействия на РСОО не отличаются особой
жесткостью, следовательно, нет необходимости предусматривать герметизацию
прибора и элементов амортизаций для уменьшения влияния механических
воздействий.
В нашем варианте разработан вертикальный вариант размещения
прибора, так как это позволяет быстро узнать информацию об объекте.
Материал корпуса, пластмасса, так как позволяет сделать форму
корпуса любого вида и вес устройства будет минимальным, что не маловажно.
Следует проанализировать размещение органов управления,
индикации и соединителей с внешними приборами. На передней панели находятся
элементы отображения. Отображение выполнено из 5 светодиодов, 4 из которых
отображают процесс контроля состояния шлейфов ШС, и 1 светодиод индицирует
режим работа. Так же для дополнительного информирования внутри расположен
звуковой оповещатель. Клеммы для соединения контроллера с внешними устройствами
расположены в боковой части корпуса.
В корпусе должны быть предусмотрены элементы для крепления
печатной платы.
Анализируя вышеперечисленные требования, получаем, что лучше
всего применить корпус, состоящий из крышки и основания. Так как изготовления
корпуса для разрабатываемого устройства более затратно, выбираем и покупаем
готовый стандартный корпус уовлетворяющий нашим требованиям. В выбранном
корпусе Плата крепятся механически с помощью четырех саморезов на основание,
четырех местах. Индикация выводится на крышку контроллера. Крышка крепится к
основанию акже с помощью саморезов с потайной головкой. В выбранном корпусе
есть также специальные ушки для монтирования контроллера с радиоканалом в
помещение на стену что очень удобно.
4.
Расчетная часть
4.1
Расчет резонансной частоты платы
В процессе эксплуатации большинство видов радиоэлектронной
аппаратуры подвергается механическим воздействиям, характер и интенсивность
которых могут быть весьма разнообразными в зависимости от источников
воздействия и их расположения относительно аппаратуры.
Рассмотрим расчет частоты собственных колебаний прямоугольной
пластины.
Исходные данные:
материал основания платы стеклотекстолит фольгированный
модуль упругости Е×105, кг/см2 3,45
плотность р, г/см3 от 1,8 до 3,3
Параметры элементов, монтируемых на плате, приведены в
таблице 5.
Таблица 5. Параметры элементов
|
Обозначение элементов
|
Кол-во, шт.
|
Масса одного элемента, г
|
Общая масса элементов, г
|
|
А1
|
1
|
6,3
|
6,3
|
|
BF1
|
1
|
0,32
|
0,32
|
|
С2, С3, С5, С7, С9, С10, С12, С13, С16
|
9
|
0,019
|
0,171
|
|
С1, С4, С6, С8, С11, С14, С15, С17─С19,
С22─С24, С26, С27
|
15
|
0,003
|
0,045
|
|
С20, С25
|
2
|
0,3
|
0,6
|
|
С21, С28
|
2
|
0,9
|
1,8
|
|
DA2, DA4, DA5
|
3
|
0,150
|
0,150
|
|
DA3
|
1
|
2,07
|
2,07
|
|
DD1
|
1
|
2,361
|
2,361
|
|
|
|
|
|
DD2
|
1
|
0,192
|
0,192
|
Для всех случаев закрепления краев пластины собственная
частота [Гц] определяется по формуле:
 (4.1)
(4.1)
где a - длина пластины, см
h-толщина пластины, см
c - частотная постоянная.
Значения частотной постоянной в зависимости от варианта
закрепления и от отношения длин сторон пластины определяются из [20]. Для
случая, с жестким закреплением краев печатной платы принимаю значение частотной
постоянной: с=145.
Если пластина изготовлена не из стали, а из другого
материала, то в формулу вводиться поправочный коэффициент на материал:
 (4.2)
(4.2)
где E - модуль упругости применяемого материала, кг/см2;
p - плотность применяемого материала, г/см3;-
модуль упругости стали, Ес=21 × 105 кг/см2;-
плотность стали, pc=7,85 г/см3;
Если пластина равномерно нагружена, то вводится поправочный
коэффициент на массу элементов:
 (4.3)
(4.3)
где Qэ - масса элементов, размещенных на пластине;П -
масса пластины.
Таким образом, формулу для определения собственной частоты
колебаний равномерно нагруженной пластины можно записать в следующем виде:
 (4.4)
(4.4)

В соответствии с [17] диапазон внешних частот, воздействующих
на стационарную аппаратуру, составляет от 1 до 55 Гц, что намного меньше
собственных частот печатных плат.
Вывод: резонансная частота контроллер охранной системы с
радиоканалом считается удовлетворительной.
4.2
Расчет надежности изделия
Надежность - свойство изделия сохранять свои параметры в
заданных пределах и в заданных условиях эксплуатации в течение определенного
промежутка времени. [21]
Общую надежность можно принимать как совокупность трех
свойств: безотказность, восстанавливаемость, долговечность.
Безотказность - свойство системы непрерывно сохранять
работоспособность в течение заданного времени в определенных условиях
эксплуатации. Она характеризуется закономерностями возникновения отказов. [21]
Восстанавливаемость - это приспособленность системы к
обнаружению и устранению отказов с учетом качества технического обслуживания.
Она характеризуется закономерностями устранения отказов. [21]
Долговечность - свойство системы длительно сохранять
работоспособность в определенных условиях. Количественно характеризуется
продолжительностью периода практического использования системы от начала
эксплуатации до момента технической и экономической целесообразности дальнейшей
эксплуатации. [21]
Методы повышения надежности, в зависимости от области их
применения, можно разделить на три основные группы: производственные,
схемно-конструкторские, эксплуатационные.
К производственным методам относятся: получение однородной
продукции, стабилизация технологии, анализ дефектов и механизмов отказов,
разработка методов испытаний, определение зависимости показаний надежности от
интенсивности внешних воздействий. [21]
К схемно-конструкторским методам относятся: выбор подходящих
условий нагрузки, унификация узлов и элементов, разработка схем с допусками на
отклонение параметров элементов, резервирование, контроль работы оборудования,
введение запаса работы во времени. [21]
К эксплуатационным методам относятся: сбор информации
надежности, увеличение интенсивности восстановления, профилактические
мероприятия, граничные испытания. [21]
Наиболее ответственным этапом по удовлетворению требований
эксплуатационной надежности является этап проектирования.
Насколько всесторонне учтены при проектировании и
изготовлении опытного образца условия производства и эксплуатации с точки
зрения безопасности в работе, ремонтопригодности, долговечности аппаратуры,
настолько последняя будет обладать эксплуатационной надежностью.
К критериям безопасности относятся: вероятность безотказной
работы, частота отказов, интенсивность отказов, среднее время безотказной
работы, наработка на отказ.
Интенсивностью отказов называется отношение числа отказавших
изделий в единицу времени к среднему числу изделий, продолжавших исправно
работать. Средним временем безотказной работы называется арифметическое время
исправной работы изделия. В теории вероятности применяются различные законы
распределения. Наиболее простым распределением потока отказов во времени
является эксплуатационный закон распределения, который рассматривает последовательность
отказов во времени, как простейший поток событий. [21]
В основе расчета надёжности по внезапным отказам лежат
следующие положения:
интенсивность отказа любого i-го (i=1,2,…, m) элемента ЭС
равна среднему значению за период его эксплуатации, т.е. λi(t)=λi=const;
закон распределения вероятности безотказной работы элементов
ЭС - экспоненциальный
 (4.5)
(4.5)
соединение элементов, с точки зрения теории надёжности,
последовательное, т.е. отказ любого из элементов приводит к отказу всего ЭС.
При последовательном соединении элементов вероятность безотказной работы ЭС
РA(t) равна
 , (4.6)
, (4.6)
где  - интенсивность отказов.
- интенсивность отказов.
интенсивность отказа элементов в условиях эксплуатации λэк. выбирается из справочных данных или рассчитывается по формуле
(4.7).
 (4.7)
(4.7)
где λ0- интенсивность отказа элементов в
нормальном режиме;j - коэффициенты, зависящие от электрической
нагрузки и температуры, при которых работает элемент, а также постоянные
коэффициенты, характеризующие конструктивно - технологические особенности
элемента;=1,2,…, n.
Расчет показателей надежности контроллера определяется обобщенный
эксплуатационный коэффициент Кэ, учитывающий область применения и
функциональное назначение РЭА. Значение Кэ выбирается из таблицы 8 [21].
Кэ=1,5.
Определение поправочных коэффициентов Кr и Кр, учитывающие влияние
влажности и атмосферного давления окружающей среды на работу РЭА. Значения Кr и
Кр выбираются соответственно из таблицы 9 [21] и таблицы 10 [21].
Кr=1,5;
Кр=1.
Определение интенсивности отказов элементов РЭА.
Для интегральных микросхем (ИС) расчет интенсивности отказов не
производится; их значения берутся из справочников, где данные получены по
результатам испытания и эксплуатации ИС. В таблице 11 [21] приведены
интенсивности отказов ИС 1…5 степеней интеграций
При расчете надежности РЭА, построенной на сериях ИС первой и
второй степени интеграции, отсутствующих в таблице 11 [21], рекомендуется
пользоваться интенсивностью отказов для цифровых ИС, равной 2×10-71/ч, а для аналоговых ИС, равной 8×10-71/ч.
Для расчета интенсивности отказов полупроводниковых приборов (ПП)
используется формула, учитывающая электрическую нагрузку и температуру, при
которых работает контроллер.
 , (4.8)
, (4.8)
где l0- интенсивность отказа ПП в номинальном режиме
работы (значение l0 берется из таблицы 12 [21]);
А, NТ, ТМ, р, Dt - постоянные
коэффициенты (значение данных коэффициентов выбираются из таблицы 13 [21]);-
рабочая температура окружающей среды или корпуса ПП, оС;
КН - коэффициент электрической нагрузки, рассчитываемый по
формуле:
для транзисторов КН=Рраб/Рдоп,
для диодов КН=Iвып/Iвып.доп или КН=Uобр/Uобр.доп,
раб и Iраб - рассеиваемая мощность и ток,
вычисленные для рабочего режима;вып - прямой ток в рабочем режиме;обр
- обратное напряжение в рабочем режиме;доп, Pдоп, Iвып.доп,
Uобр.доп. - допустимые электрические параметры по ТУ или ГОСТ на ПП.
Для определения КН необходимо произвести электрический расчет
принципиальной схемы. Величина КН не должна превышать значения 0,7.
Расчет произведем на ПК с помощью специальной программы.
В таблице 6 представлен перечень элементов устройства, а
также параметры интенсивности отказов радиоэлементов.
Таблица 6 - Количество и суммарная
интенсивность отказов элементов
|
Наименование элементов
|
Количество, шт.
|
Суммарная интенсивность отказов, с учётом
количества. элементов 1/ч
|
|
Трансивер модуль МО-СС2420-Z
|
1
|
8,0×10-7
|
|
Звукоизлучатель HCM1205X
|
1
|
10×10-7
|
|
Конденсаторы SMD_1206, 0603
|
23
|
0,2×10-7
|
|
Конденсаторы TECAP-220-35
|
2
|
1,2×10-7
|
|
Конденсаторы К50-68
|
2
|
1,0×10-7
|
|
Микросхемы; ADM1485, MC34063AD, MC7805
|
4
|
8,0×10-7
|
|
Микросхемы: AT24LC512, ATmega32-16PU
|
2
|
2,0×10-7
|
|
Фильтр индуктивный BLM31AJ260
|
2
|
2,5×10-7
|
|
Катушка индуктивности CR4NP-4R7MC
|
2
|
1,5×10-7
|
|
Резисторы
|
51
|
0,3×10-7
|
|
Оптоэлектронное реле CPC1117N
|
2
|
7,0×10-7
|
|
Диоды PESD5V0L4, MBRS1100T3, BAS332L
|
23
|
1,5×10-7
|
|
Светодиоды CLM1C, SSBI-300
|
5
|
1,0×10-7
|
|
Транзисторы BC817-16.215, BC807-40.215
|
3
|
0,8×10-7
|
|
Разъемы PLS-6R, MA522-500M3
|
9
|
1,6×10-7
|
|
Кварцевый резонатор KX-3HE 8.0 MHz
|
1
|
2,0×10-7
|
|
Пайка печатного монтажа
|
389
|
0,1×10-7
|
|
Проводники печатных плат
|
678
|
2,0×10-7
|
1200
|
50,7×10-7
|
Общая интенсивность отказа РЭА равна 3,7×10-5 1/ч.
Средняя наработка РЭА до первого отказа 8567 часов.
Вероятность безотказной работы контроллера за время 8000
часов равна 0,75.
Вывод: разработанная конструкция контроллера удовлетворяет
техническое задание в части надёжности.
4.3
Расчет теплового режима
Тепловой режим характеризуется электрическим режимом работы и
условиям эксплуатации.
Электрический режим определяется мощностью, рассеиваемой
контроллером с радиоканалом. Изменение температуры окружающей среды, является
основным фактором при оценке влияния условий эксплуатации на тепловой режим и
конструкцию систем обеспечения теплового режима.
Естественное воздушное охлаждение является наиболее простым,
надежным и дешевым способом охлаждения и осуществляется без затрат
дополнительной энергии. Принцип охлаждения естественной конвекции основан на
том, что слои воздуха, нагреваясь от элемента, выделяющего тепло, и обладая
меньшей плотностью и большой кинетической энергией, перемещаются вверх и
замещаются более холодными слоями[22].
Принудительное охлаждение получило тоже большое
распространение, так как позволяет при более высоких удельных мощностях
рассеивания обеспечить нормальный тепловой режим при относительной простоте и
небольшой стоимости систем обеспечения теплового режима. Различают три основных
схемы принудительного воздушного охлаждения: внутреннее перемешивание, наружный
обдув, продувка.
В данном разделе нецелесообразно рассматривать эти схемы
подробнее. При изготовлении контроллер охранной системы с радиоканалом
целесообразно использовать естественное охлаждение, что не ведет за собой
дополнительных материальных и производственных затрат.
Алгоритм расчета теплового режима с естественным воздушным
охлаждением. [22]
Исходными данными для расчёта являются:
§ мощность, рассеиваемая в блоке, Р (Вт);
§ давление окружающей среды Н (Па);
§ температура окружающей среды Т (°С);
§ размеры корпуса блока для горизонтальной
ориентации плат длина L1 (м), ширина L2 (м), высота L3 (м);
§ для вертикальной ориентации плат-размер, вдоль
которого располагаются платы L1 (м); высота L2 (м); размер, перпендикулярно
которому располагаются платы L3 (м);
§ коэффициент заполнения К;
§ количество перфорационных отверстий N;
§ для круглых: диаметр отверстия D(м).
Порядок расчета теплового режима
) Определяются: поверхность корпуса блока.
SК =2 × (L1 × L2 + (L1
+ L2) × L3), (4.9)
где L1, L2 - горизонтальные размеры корпуса блока;-
вертикальный размер корпуса блока.
) Определяется условная поверхность нагретой зоны
З =2 × (L1 × L2 + (L1
+ L2) × L3 × K), (4.10)
3) Определяется удельная мощность корпуса
QК =P/ SК, (4.11)
) Рассчитывается удельная мощность нагретой зоны
QЗ =P/ SЗ, (4.12)
КQK = υ1= 0.1472×QК-0.2962×10-3 × QК2+0.3127×10-6 × QК2 (4.13)
) Находится коэффициент перегрева нагретой зоны
зависящий от удельной мощности нагретой зоны
КQЗ= υ2 = 0,139×Q3 - 0,1223×10-3 × Q32 +
0,0698×10-6 × Q32 (4.14)
) Находится коэффициенты КН1 и КН2, зависящий от
давления среды внутри и вне корпуса аппарата
КН1=0,82+1/(0.925+4.6×10-5 × H1) (4.15)
КН2=0,8+1/(1.25+3.8×10-5 × H2) (4.16)
) Рассчитывается площадь перфорационных отверстий.
Для прямоугольных и щелевых
S=N × L4 × L5, (4.17)
где N - количество отверстий;- горизонтальный размер
отверстия;- вертикальный размер отверстия.
Для круглых отверстий
S= N ×
π× D2/4, (4.18)
где D - диаметр отверстия.
) Рассчитывается коэффициент перфорации
При горизонтальном расположении платы
П=S/(2× L1 × L2), (4.19)
При вертикальном расположении платы
П=S/(2×L1 × L3), (4.20)
) Коэффициент перегрева, зависящий от коэффициента
перфорации корпуса
КП =0,29+1/(1.41+4.95 × П) (4.21)
) Определяем перегрев корпуса
υК= υ1× KН1 × KП × 0,93 (4.22)
) Определяем перегрев нагретой зоны
υЗ =0,93×KП × (υ1 × KН1+(υ2 /0,93 - υ1)
× KН2), (4.23)
) Определяется средний перегрев воздуха в блоке
υВ = υЗ × 0,6 (4.24)
) Находятся температуры корпуса блока, нагретой зоны,
воздуха в блоке
Температура корпуса блока
К= υК +TС,
где TС - температура окружающей блок среды.
Температура нагретой зоны
З= υЗ +TС
Средняя температура воздуха в блоке
В= υВ +TС
Исхдные данные:
Мощность, рассеиваемая в блоке P=3 Вт
Давление окружающей среды H=15000 Па
Температура окружающей среды t=35°С
Размеры корпуса для вертикальной ориентации плат (продольный,
высота, перпендикулярный) (м): 0,157.8´0,095.5´0,053
Коэффициент заполнения К=1
Результаты расчета:
Поверхность корпуса блока 0,056 кв. м
Условная поверхность нагретой зоны 0,056 кв. м
Удельная мощность корпуса 57,33 Вт
Удельная мощность нагретой зоны 52,77973 Вт
Перегрев корпуса 3,21°С
Перегрев нагретой зоны 4,33°С
Средний перегрев воздуха в блоке 3,56°С
Температура корпуса блока 38,21°С
Температура нагретой зоны 39,33°С
Средняя температура воздуха в блоке 38,56°С При расчете
теплового режима контроллера получили значение меньше предельно допустимой
(плюс 40°С)
температуры, следовательно, обеспечивается нормальный тепловой режим при
естественном охлаждении. Принудительной вентиляции не требуется.
4.4
Расчет электромагнитной совместимости
Под внутренней электромагнитной совместимостью понимается
свойство РЭС и его частей (ячеек, блоков, шкафов, пультов) функционировать без
ухудшения качественных показателей при заданной внутри РЭС или его частей
электромагнитной обстановке. Чтобы оценить ожидаемое искажение сигналов и
наводки в проводниках основной печатной платы контроллера связи необходимо
рассчитать электрические параметры линий связи. Методика расчёта изложена в
[23].
Расчет произвожу для двух проводников печатной платы. С одной
стороны платы находится печатный проводник, а с другой металлическая перемычка.
Формулы для расчета проводников:
) Для расчёта одиночного печатного проводника использую
формулы 4.25 и 4.26.
Рисунок 26 - Одиночный печатный проводник
 (4.25)
(4.25)
 (4.26)
(4.26)
) Печатный проводник над экраном
Рисунок 27 - Печатный проводник над экраном
 , (4.27)
, (4.27)
 (4.28)
(4.28)

где L - индуктивность проводника, мкГн;
С - емкость проводника, пФ;
- длина проводника, м;ПР - толщина проводника, м;- ширина
проводника;ПЛ - толщина печатной платы, м;
εЭФ - диэлектрическая проницаемость материала платы.
Определяем паразитные параметры одиночного проводника:


Определяем паразитные параметры для проводника над экраном:

Выбираем волновое сопротивление для печатных полосковых линий,
предварительно рассчитав отношение w/hПЛ: Z=14
Выбираем взаимную емкость проводников для случая, когда проводники
располагаются на двух сторонах печатной платы:
 =0,1 пФ/см.
=0,1 пФ/см.
Общая паразитная емкость между двумя проводниками, расположенными
на одной или на двух сторонах печатной платы, определяется по формуле:
 , (4.29)
, (4.29)
С=0,1×10×8=8пФ.
Паразитная взаимоиндукция между печатными проводниками
характеризуется коэффициентом взаимоиндукции (нГн), который определяется по
формуле:
 , (4.30)
, (4.30)
где 1пр
- максимальная длина проводников, м;- расстояние между проводниками, м;l,
w2 - ширина первого и второго проводника, м.

Максимальное напряжение помехи, наводимое в проводнике,
определяем по формуле:
 , (4.31)
, (4.31)
гдеRBbIX - выходное сопротивление цифрового узла, Ом;
τФ - длительность фронта импульса, с;
ΔU - перепад напряжения, В;
ΔI - перепад тока. А.

Согласно [20] допустимое значение ёмкости для микроконтроллеров
серии ATmega32-16PU составляет 110 пФ, а допустимое значение индуктивности
проводников 0,16 мкГн, при амплитуде импульсного тока 10 мА.
Из [23] выбираем максимальное допустимое напряжение помехи для
КМОП-схем равное: Uпом=2 В.
Проведя данный расчет можно сделать следующий вывод.
Полученные параметры емкости и индуктивности находятся в пределах
допустимых значений для данного типа устройства. Напряжение помехи не превышает
предельный уровень. Таким образом, в устройстве обеспечивается нормальная
электромагнитная совместимость.
5.
Технологическая часть
5.1
Описание технологического процесса сборки
Правильно разработанный технологический процесс должен
обеспечивать выполнение всех требований, указанных в рабочих чертежах и
технических условиях, высокую производительность и высокие экономические
показатели.
Исходными данными для проектирования техпроцессов являются, в
данном случае, сборочный чертеж устройства, спецификация всех деталей, рабочие
чертежи деталей и сборочных единиц, входящих в состав изделия, а также размер
производственного задания и руководящие технические материалы (данные об
оборудовании, нормали на инструменты, типовые техпроцессы и др.).
Процесс изготовления радиоаппаратуры состоит из отдельных
взаимосвязных частных технологических процессов, к которым относятся:
входной контроль комплектующих электрорадиоэлементов;
технологическая тренировка деталей и узлов;
механическая сборка радиоэлектронной аппаратуры;
подготовка элементов устройства к монтажу;
электрический монтаж радиоэлектронной аппаратуры;
технический контроль сборки и монтажа;
защита аппаратуры от воздействия внешней среды;
регулировка радиоаппаратуры;
технологическая тренировка аппаратуры;
испытания радиоаппаратуры;
выходной контроль.
Проектирование техпроцессов сборки начинают с изучения
рабочих чертежей и технических условий. Затем намечают последовательность
выполнения операций, производят выбор оборудования, оснастки, расчет
технологических режимов и нормирования. При разбивке техпроцесса на операций
возможны два пути: концентрация (укрупнение), т.е. нескольких простых операций
в одну сложную, и дифференциация, т.е. раздробление, расчленение операции на
несколько простых[17].
В последнем случае требуется большее число рабочих мест, на
каждом из которых выполняется простая операция, что ведет к упрощению
оборудования, появлению возможности использования рабочей силы более низкой квалификаций,
повышению производительности труда, улучшению качества выпускаемой продукций.
При проведении дифференциации техпроцесса создаются условия
для использования эскизно-операционной технологии сборки, при которой на каждую
операцию составляется технологическая карта, содержащая эскиз, краткое описание
работы, перечень деталей и используемых материалов. При этом исключается
необходимость пользования сборочными чертежами, монтажными схемами, а также
подробным описанием работы.
Также при большей степени дифференциации техпроцесса
появляется возможность сделать равными или кратными по длительности, что
способствует быстрому переходу на поточные методы производства[17].
Проектирование технологического процесса сборки значительно
упрощается, если проанализирована структура конструкции РЭА, ее
конструктивно-технологические особенности, варианты организаций процесса
сборки. Для этого составляют технологические схемы сборки. Эти схемы дают
возможность определить взаимную связь между деталями и сборочными единицами
РЭА. Построение таких схем практически представляет собой разработку проекта
технологического процесса.
При этом руководствуются следующими показателями:
схемы строят независимо от объема выпуска РЭА;
сборочные единицы схем образуются независимо от условий
сборки, контроля хранения и транспортировки;
первая ступень сборочного состава не является сборочной
единицей (под сборочной единицей здесь понимается изделие, составные части
которого подлежат соединению между собой на предприятии - изготовителе);
минимальное количество деталей, необходимых для образования
сборочной единицы равно двум;
при присоединении к сборочной единице данной ступени сборки
одной детали образуется сборочная единица высшей степени;
каждая высшая ступень не может быть образована без наличия
предыдущее ступени[17].
На практике используют схемы сборки с «базовой деталью» и
«веерного» типа. Схема сборки с базовой деталью отражает последовательность
процесс сборки. Базовой деталью является плата, панель или другая деталь, с
которой начинается сборка, направление движения деталей и сборочных единиц
показывают стрелками.
Схема сборки «веерного» типа показывает, из каких деталей,
образуется сборка. К достоинствам этой схемы относятся простота и наглядность,
но она не отражает последовательность сборки.
Схемами сборки пользуются при разработке техпроцесса наряду
со сборочным чертежом и техническими условиями. Различают две основные
организационные схемы сборки: стационарную и подвижную.
Стационарная сборка выполняется на одном рабочем месте, к
которому подаются все необходимые детали и сборочные единицы. Она является
наиболее распространенным типом сборки в условиях индивидуального и серийного
производства.
Стационарная сборка может строиться по принципу концентрации
и дифференциации. В первом случае весь сборочный процесс выполняется одним
сборщиком, а при дифференциации разделяется на предварительную и
окончательную[17].
Предварительная сборка производится несколькими отдельными
бригадами параллельно, а общая сборка - отдельной бригадой или одним рабочим.
Это обеспечивает специализацию рабочих и сокращает длительность сборки.
Стационарная сборка по принципу дифференциации целесообразна
при значительной трудоемкости сборочного процесса или большой программе выпуска
по отдельным видам изделия[17].
Подвижная сборка выполняется при перемещении собираемого
изделия от одного сборочного места к другому. На каждом рабочем месте
выполняется одна повторяющаяся операция. Эта форма сборки применяется в
условиях поточного производства. Она может осуществляться двумя способами:
со свободным движением собираемых объектов, перемещаемых от
одного рабочего места к другому, вручную или с помощью механического
транспортера;
с принудительным движением собираемых объектов, которые
перемещаются посредством конвейера при строго рассчитанном такте. Весь процесс
сборки осуществляется непосредственно на конвейере.
При таком устройстве изделия уместным будет использование
схемы «веерного» типа. Требуется расчленить весь этот процесс сборки и монтажа
на операции, осуществляемые на отдельных рабочих местах. При формировании
операций исходят из требуемого ритма потока и трудоемкости работ и порядка их
выполнения. Желательно, чтобы по продолжительности каждая операция была равна
определенному ритму или кратна ему в том случае, если некоторые процессы
технологически невыгодно или невозможно расчленить.
При формировании операции технологического процесса не
следует объединять процессы сборки и монтажа. Делать такие исключения
допускается лишь в тех случаях, когда они технологически сочетаются. Также
сборку объединяют с монтажом для синхронизации операций[17].
Маршрутная карта, разработанная на техпроцесс сборки,
приведена в приложении.
5.2
Анализ технологичности
Под технологичностью конструкций аппаратуры следует понимать
совокупность свойств конструкции, проявляющихся в возможности оптимальных
затрат труда, материалов и времени при технологической подготовке производства,
изготовлении, эксплуатации и ремонте, по сравнению с соответствующими
показателями однотипных конструкций изделий того же назначения при обеспечении
установленных значениях показателей качества и принятых условиях изготовления,
эксплуатации и ремонта [17].
Оценка технологичности конструкций может быть качественной и
количественной.
Качественная оценка характеризуется технологичностью
конструкций, обобщенно на основании опыта специалистов-исполнителей
(экспертов). Качественная сравнительная оценка вариантов конструкции возможна
на всех стадиях проектирования, когда производится выбор лучшего
конструктивного решения и требуется определить степень различия технологичности
сравниваемых вариантов[17].
Количественная оценка технологичности конструкций выражается
показателем, численное значение которого характеризует степень удовлетворения
требованиям технологичности конструкций. Количественная оценка рациональна
только в зависимости от признаков, которые существенно влияют на
технологичность рассматриваемой конструкций[17].
Все показатели технологичности делятся на конструкторские и
технологические. Представление исходных данных для расчета показателей
производится: по конструкторским показателям - конструктором, по
технологическим показателям - технологом.
В число отбираемых в качестве базовых должны отбираться такие
показатели, которые оказывают наибольшее влияние на технологичность конструкций
блоков определенного назначения и условий применения.
По номенклатуре показателей блоки различной аппаратуры можно
разбить на следующие четыре класса: радиотехнические, электронные,
электромеханические и коммутационные. Наиболее уместным представляется отнести
проектируемое изделие к электронным блокам [17].
Основным показателем, используемым при оценке технологичности
конструкции, является комплексный (интегральный) показатель, под которым
понимается показатель технологичности конструкций, характеризующий несколько ее
признаков. Комплексный показатель определяется на основе базовых показателей по
формуле (5.1).
 (5.1)
(5.1)
где Кi - базовый показатель соответствующего класса
блоков;
φi - функция, нормирующая весовую значимость показателя;-
порядковый номер показателя в ранжированной последовательности;- общее число
относительных частных показателей.
Для электронных блоков используются следующие показатели технологичности:
коэффициент использования микросхем и микросборок в блоке:
Кимс=Нмс/Нэрэ, (5.2)
где Нмс - количество микросхем, используемых в
устройтсве;
Нэрэ - общее количество электрорадиоэлементов (шт).
коэффициент автоматизации и механизации монтажа изделия:
Кам=Нам/Нм, (5.3)
где Нам - число монтажных соединений, которые
могут быть выполнены механизированным или автоматизированным способом (шт);
Нм - общее число монтажных соединений.
коэффициент механизаций подготовки ЭРЭ к монтажу:
Км.п.эрэ=Нм.п.эрэ/Нэрэ (5.4)
где Нм.п.эрэ - число ЭРЭ, подготовка которых к
монтажу может осуществляться механизированным или автоматизированным способом;
коэффициент механизации контроля и настройки:
Км.к.н.=Нм.к.н./Нк.н., (5.5)
где Нм.к.н. - число операций контроля и настройки,
которые можно выполнить механизированным или автоматизированным способом;
Нк.н. - общее число операций контроля и настройки, шт.
коэффициент повторяемости ЭРЭ:
Кпов.эрэ=1-Нт.эрэ/Нэрэ, (5.6)
где Нт.эрэ - общее число типоразмеров ЭРЭ;
коэффициент применяемости ЭРЭ:
Кп.эрэ=1-Нт.ор.эрэ/Нт.эрэ, (5.7)
где Нт.ор.эрэ - число типоразмеров оригинальных
ЭРЭ в изделии (к оригинальным относятся составные части (детали, узлы, ЭРЭ),
разрабатываемые и изготавливаемые впервые как самим предприятием-разработчиком,
так и в порядке кооперирования с другими предприятиями);
Нт.эрэ - общее число типоразмеров ЭРЭ в изделии.
коэффициент прогрессивности формообразования деталей:
Кф=Дпр/Д, (5.8)
где Дпр - число деталей заготовки, детали могут
быть получены прогрессивными методами формообразования (штамповка, прессование,
литье и т.д.).
Д - общее число деталей изделий (без нормализованного
крепежа), шт.
Общее число электрорадиоэлементов, используемых в РСОО
составляет, согласно перечню элементов:
конденсаторы: 27 штук;
резисторы: 58 штук;
диоды: 28 штук;
транзисторы: 3 штука;
микросхемы: 7 штук;
прочие элементы: 18 штук;
Коэффициент использования микросхем и микросборок, согласно
выражению (5.2) составит:
Кимс=7/141=0,05
При расчете коэффициента автоматизации монтажа изделия за
монтажные соединения, осуществляемые автоматизированным способом считались
соединения, выполняемые печатным монтажом. Их число ориентировочно составляет
при общем числе монтажных соединений (вместе с соединениями, выполняемыми
объемным монтажом) 389, коэффициент автоматизаций и механизаций монтажа изделия
составит:
Кам=342/389=0,88;
При расчете коэффициента механизации подготовки ЭРЭ к монтажу
элементами, подготовка которых может осуществляться механизированным способом,
считались элементы с осевыми выводами (резисторы и диоды), микросхемы,
конденсаторы, т.е. элементы, установка которых может производиться
автоматизированным способом. Число подобных элементов составляет 47 штук. При
общем количестве радиоэлементов 141 шт., коэффициент механизаций подготовки ЭРЭ
составит:
Кмп.эрэ=47/141=0,33;
Число различных типоразмеров ЭРЭ, используемых в устройстве
составляет 14 штук. Тогда коэффициент повторяемости ЭРЭ согласно формуле (5.6)
составит:
Кпов.эрэ=1 - (14/141)=0,9;
К оригинальным элементам были отнесены основание крышка.
Коэффициент применяемости ЭРЭ, согласно выражению (5.7) составит:
Кп.эрэ=1 - (2/14)=0,93
Детали корпуса проектируемого изделия, в основном, выполнtys прогрессивными методами:
литьем из пластмассы и поэтому коэффициент прогрессивности формообразования
деталей можно считать равным единице.
Результаты расчета показателей технологичности изделия
приведены в таблице 7.
Таблица 7 - Технологичность изделия
|
Показатель технологичности
|
Значение
|
Весовой коэффициент
|
Ki·φi
|
|
Коэффициент использования микросхем и
микросборок
|
0,05
|
1
|
0,05
|
|
Коэффициент автоматиз. и механизаций монтажа
|
0,88
|
1
|
0,88
|
|
Коэфф. мех. подгот. ЭРЭ
|
0,33
|
0,75
|
0,09
|
|
Коэффициент повторяемости ЭРЭ
|
0,9
|
0,31
|
0,28
|
|
Коэффициент применяемости ЭРЭ
|
0,93
|
0,187
|
0,17
|
|
Коэффициент прогрессивности формообразования
деталей
|
1
|
0,11
|
0,11
|
Комплексный показатель, рассчитанный по выражению (4)
составит:

Поскольку К=0,5 входит в диапазон показателей технологичности для
установочной серии класса «Э» (0,4 ─ 0,7), то можно сделать вывод что
конструкция на технологичность на данном этапе проектирования отработана [19].
5.3
Разработка технологического процесса сборки устройства
Технологическим процессом сборки называется совокупность
операций, в результате которых детали соединяются в сборочные единицы, а
сборочные единицы - в изделие. Изделием называется любой предмет или набор
предметов производства, подлежащих изготовлению на предприятии. Изделия
основного производства предназначены для поставки, а вспомогательного
производства только для собственных нужд [17].
Правильно разработанный технологический процесс должен
обеспечить выполнение всех требований, указанных в рабочих чертежах и
технических условиях, высокую производительность и высокие экономические
показатели.
Проектирование технологического процесса значительно
упрощается, если проанализирована структура конструкции, ее конструктивно
технологические особенности, варианты организации процесса сборки. Для этого
составляют технологические схемы сборки. Эти схемы дают возможность определить
взаимную связь между деталями и сборочными единицами конструкции. Построение
таких схем практически представляет собой разработку проекта технологического
процесса, при этом руководствуются следующими рекомендациями:
а) схемы строят независимо от объема выпуска РЭА;
б) сборочные единицы схем образуются независимо от условий
сборки, контроля, хранения и транспортировки;
в) первая ступень сборочного состава не является сборочной
единицей (под сборочной единицей здесь понимается изделие, составные части
которого подлежат соединению между собой на предприятии - изготовителе);
г) минимальное количество деталей, необходимое для
образования сборочной единицы равно двум;
д) при присоединении к сборочной единице данной степени
сборки одной детали образуется сборочная единица высшей ступени;
е) каждая высшая ступень не может быть образована без наличия
предыдущей ступени[17].
Сборка РЭА осуществляется в 3 этапа:
этап - механический монтаж;
этап - электрический монтаж;
этап - сборка готового изделия.
При анализе технологичности проводят разделение изделия на
детали, сборочные единицы и узлы согласно ГОСТ 2.101-68 путем построения схем
сборочного состава.
Существуют схемы сборки с базовой деталью и «веерного» типа.
Схема сборки с базовой деталью обладает меньшей наглядностью
относительно схемы сборки «веерного» типа, но дает ясное представление о
последовательности сборки.
Схема сборки «веерного» типа показывает, из каких деталей
образуется сборка. Достоинством такой схемы является ее простота и наглядность,
но она не отражает последовательность сборки.
5.4
Расчленение операции на переходы
Нормирование сборочных работ производим на основании
технологических документов и нормативов времени. Рассчитываем штучное время для
выполнения операции по следующей формуле
 (11)
(11)
где ТОП - оперативное время;
К - коэффициент учитывающий время на
организационно-техническое обслуживание рабочего места 9,3%.
Разбивка операции на переходы и их нормирование с расчетом
штучного времени для каждой операции произведены в таблице 8.
Таблица 8 - Переходы и нормирование
|
№
|
Наименование операции
|
Вид выполняемой операции
|
Оборудование, инструменты
|
Время, мин
|
|
1
|
Сборка крышки
|
Нанести клей на место установки полистироловых
пробоки установить пробки
|
Верстак, кисть, клей
|
0.05×5=0.25
|
|
|
оперативное время Топ, мин
|
|
0.25
|
|
|
штучное время, Тшт, мин
|
|
0,27
|
|
2
|
Установка световодов на светодиоды
|
нанести клей на место стыковки и установить
световоды
|
верстак, кисть, клей
|
0,05×5
|
|
|
оперативное время Топ, мин
|
|
0,25
|
|
|
|
|
0,27
|
|
|
штучное время, Тшт, мин
|
|
|
|
3
|
Установка платы
|
взять плату и установить в основание, совместив
с отверстиями для крепления
|
верстак
|
0,05
|
|
|
оперативное время Топ, мин
|
|
0,05
|
|
|
штучное время, Тшт, мин
|
|
0,54
|
|
4
|
Сборка изделия
|
взять крышку установить в основание, совместив
с ограничителями, закрепить самонарезным винтом
|
верстак, отвертка, отвертка
|
0,25
|
|
|
оперативное время Топ, мин
|
|
0,25
|
|
|
штучное время, Тшт, мин
|
|
0,27
|
Итоговое штучное время Тшт=0,35 мин., среднее штучное время
Тср.шт.=0,33 мин.
Определяем такт выпуска:

где Fд - действительный годовой фонд времени работы станка
или рабочего места (при 8 часовом рабочем дне, 40 часов в неделю Fд=1981 час);-
годовая программа выпуска изделия, шт. (N=1000 шт.).
 мин/шт.
мин/шт.
Определяем коэффициент закрепления операции:

 .
.
Значение коэффициента закрепления операции соответствует
мелкосерийному типу производства 20<Кзо<40).
Запуск конвейера на производство контроллера связи
производить каждый день, чтобы уложиться в годовой план выпуска, необходимо
произвести следующие количество приборов:

5.5 Разработка оснастки
Отладочный комплект включает в себя все необходимое для
организации связи точка-точка либо небольшой сети. С помощью такого комплекта
удобно отлаживать как собственную систему передачи данных, так и знакомиться с
работой сети на основе стека протоколов ZigBee. Каждый производитель
трансиверов 802.15.4. выпускает свой комплект разработчика.
Без применения этого комплекта разработчику довольно проблематично
начать работу с микросхемой - в силу малого размера ее невозможно распаять «на
коленке», как минимум необходимо заказывать печатную плату, желательно с
рекомендованной топологией производителя чипа (рисунок 28).
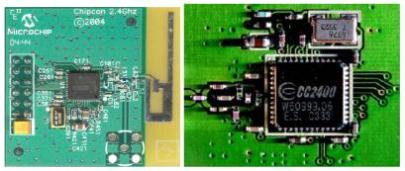
Рисунок 28 - Примеры монтажа трансивера СС2420 на переходную плату
для отладочных целей
Более удобно начинать работу с модулем ZigBee. Очень прост в
применении модуль XBee от MaxStream - он имеет стандартные штырьковые разъемы с
шагом 2 мм. Кроме трансивера MC13193 модуль XBee содержит управляющий микроконтроллер,
благодаря которому передача данных по радиоканалу приравнивается для
разработчика к передаче данных по стандартному последовательному интерфейсу.
Компания бесплатно распространяет программу для программирования модулей и
проверки дальности связи. Для выполнения теста дальности один модуль
подключается к ПК, а на удаленный модуль ставится заглушка, соединяющая выход и
вход UART. На экране ПК можно наблюдать индикатор силы принимаемого сигнала
(рисунок 29).выпускает законченный отладочный комплект «XBee™/XBee-PRO™ OEM
Development Kit» который включает в себя CD c программным обеспечением, 5
модулей XBee™ и XBee-PRO™, антенны, все необходимые переходники и кабели.
Для подключения к ПК можно использовать простейший согласователь
уровней на микросхеме MAX232. Для подключения модуля к собственному
микроконтроллеру достаточно задействовать 4 линии - 2 лини питания и линии
приема-передачи UART. Модули поставляются полностью готовыми для «прозрачной»
передачи данных со скоростью 9600 бод без какого-либо дополнительного
программирования [24].
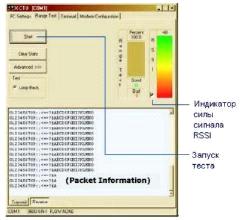
Рисунок 29 - Измерение дальности связи для модулей XBee компании MaxStream
Компания SoftBaugh выпускает отладочную плату DZ1512 c
процессором MSP430 и трансивером СС2420 (рисунок 30).

Рисунок 30 - Отладочная плата DZ 1612 c микроконтроллером MSP430 и трансивером СС2420
В комплекте поставки идет программное обеспечение от компании
AirBee (Airbee-ZNS Lite Version TI2.03), которое позволяет построить сеть
ZigBee. Тестовая программа позволяет сформировать сеть и организовать
эстафетную передачу, когда два узла сети находятся вне зоны действия друг друга
и передача пакетов осуществляется через промежуточный роутер (рисунок 31
слева).
Стек протоколов также поддерживает процедуру
самовосстановления сети. Даже если отключить питание координатора, пакеты все
равно будут доставлены адресату через другие роутеры (рисунок 31 справа).

Рисунок 31 - Передача пакетов через промежуточный роутер и
режим восстановление сети
Отладочный модуль MC13192DSK компании Freescale (рисунок 32)
представляет из себя две законченные платы с интерфейсом RS-232 и установленным
измерителем ускорения (микросхемы MMA6261Q и MA1260D). Плата позволяет строить
беспроводные сетевые решения, совместимые со стандартом IEEE® 802.15.4. В
состав набора входит документация и программное обеспечение для быстрой
разработки собственных беспроводных сетей передачи данных.

Рисунок 32 - Отладочный модуль MC13192DSK компании Freescale
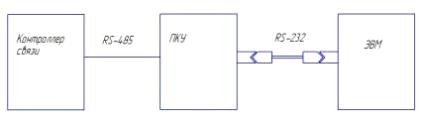
Рисунок 33 - Схема подключения оснастки
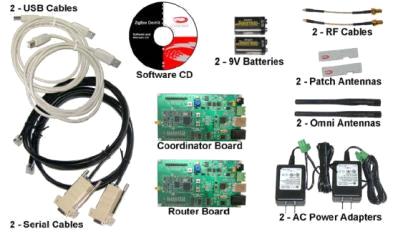
Рисунок 34 - Комплект разработчика от компании Cirronet
предоставляет пользователю API к запрограммированному в
модуль стеку протоколов. Для доступа к ресурсам модуля используется профиль
Cirronet Starndard Module (CSM). Управление идет через UART интерфейс (рисунок 33) с
помощью набора команд записи-чтения регистров во внутренней памяти модуля
(кластеров). API пользователя поддерживает следующие группы функций:
организация сети, обнаружение устройств, конфигурация модуля, передачи и прием
данных, обслуживание линий ввода-вывода модуля. Отличительной особенностью
комплекта является то, что модули имеют выходную мощность до 100 мВт, что
позволяет строить сети даже для сложных индустриальных применений.
5.6 Необходимость проверка исправности и точности
настройки датчиков охранно пожарной системы
Использование средств контроля работоспособности и точности
настройки порогов срабатывания датчиков системы пожарной и охранной
сигнализации позволяет обнаружить функциональные и метрологические отказы в
эксплуатируемой системе и вовремя их устранить. Итогом этой работы является
поддержание коэффициента готовности системы на требуемом уровне: чем ниже
надежность системы, тем чаще необходимо проводить проверку исправности и
точности настройки датчиков системы пожарной сигнализации[33].
Опыт эксплуатации современных систем показывает, что
обслуживающий персонал тратит до 70% времени на поиск мест отказа аппаратуры и
только около 30% - на устранение повреждений и замену отказавших элементов. В
общем бюджете времени, отводимого на подготовку и обслуживание аппаратуры,
операции контроля занимают до 90%. Это значит, что в упрощении и автоматизации
проверки исправности заключены значительные резервы сокращения времени и общей
стоимости эксплуатации системы пожарно-охранной сигнализации. В требованиях
необходимо периодически проверять датчики системы пожарно-охраной сигнализации.
Все датчики должны быть такого типа, чтобы их можно было испытать на правильную
работу и установить в положение нормальной работы без замены какой-либо
детали».
Для проверки датчиков могут быть использованы два метода:
функциональный, т. е. контроль исправности, и количественный допусковый, т. е.
контроль величины порогов срабатывания датчиков.
Функциональный контроль - наиболее распространенный метод
оценки работоспособности аппаратуры в целом. При этом на чувствительный элемент
датчика осуществляется воздействие физического фактора, соответствующего типу
датчика. Величина воздействующего фактора должна быть больше порога
срабатывания датчика, но меньше величины, при которой датчик может выйти из
строя. При этом работоспособность датчика контролируется как по индикатору
срабатывания, если он имеется на датчике, так и по соответствующим сигналам на
центральном приборе. При функциональном контроле количественные параметры
порогов срабатывания датчиков не измеряются, а поэтому достоверность контроля
ограничена и по его результатам нельзя оценить соответствие основных параметров
(пороговая чувствительность, быстродействие) техническим условиям на датчик.
Однако из-за сравнительной простоты этот метод контроля широко применяется на
практике[33].
Количественный допусковый контроль производится по оценке
реакции датчика на воздействие физического фактора, соответствующего типу
датчика. Величина этого фактора должна быть нормирована и в начале ниже
минимально допустимого по техническим условиям порога срабатывания датчика. При
этом выходной сигнал датчика должен отсутствовать. Затем воздействуют на датчик
физическим фактором, величина которого равна максимально допустимому по
техническим условиям порогу срабатывания датчика. При этом должен появиться выходной
сигнал датчика[33].
Из общего описания процедуры допускового контроля порогов
срабатывания датчиков следует, что аппаратура имитации физических факторов
должна обеспечивать воздействие на чувствительный элемент датчика минимально
допустимого и максимально допустимого значений с погрешностью, хотя бы на
порядок меньшей погрешности порога срабатывания проверяемого датчика. Это для
всех без исключения типов датчиков пожарной сигнализации является сложной
технической задачей.
На практике могут быть использованы оба метода контроля, однако выбор того или
иного метода производится, исходя из требований к надежности работы,
особенности ее выполнения и допустимой трудоемкости технического
обслуживания[33].
5.7 Алгоритм циклического опроса датчиков
В общем случае опрос датчиков может осуществляться циклически
и ациклически (адресно). При циклическом опросе порядок подключения датчиков к
ИВК сохраняется постоянным во времени. Ациклический опрос точек измерения
производится, как правило, по требованию оператора при нарушении нормального
протекания технологического процесса[34].
Блок - схема алгоритма циклического опроса датчиков и
контроля их показаний приведена в приложении.
Предпологается, что датчики пронумерованы последовательно,
начиная с первого и кончая n. Исходными данными для алгоритма служат число
датчиков n, массивы верхних и нижних А, В, С, Д для сбора данных о выходе за
пределы нормы показаний датчиков. В ячейках памяти А, В, С, Д соответственно
хранятся показания 1-го датчика, Х отклонения его значения от нормы X,
порядковый номер датчика и время (t), в которое произошло отклонение от нормы.
Опрос начинается с первого датчика. Вначале следует сравнить
показания датчика с верхней нормой. Если это показание не выходит за верхнее
предельное значение, то переходят к сравнению с нижней нормой. Если показание
первого датчика не выходит за пределы верхней и нижней нормы, то переходят к
опросу второго датчика. Аналогично обрабатывается информация, считываемая с
последующих датчиков. Если при опросе всех датчиков системы их показаия
остаются в пределах нормы, то машина прекращает работу по данному алгоритму.
Печать данных не производтся или производится только по требованию оператора.
Для следующего цикла опроса датчиков необходимо повторить запуск программы.
Если показания i-го датчика вышло за пределы нормы, то
согласно алгоритму, представленному, выполняются следующие операции: обращаются
к таймеру;
В ячейки памяти А, Б, С, Д записывают соответственно
величины.
С помощью переменной j отмечают порядковый номер события
выхода контролируемого параметра за пределы нормы;
Из ячеек А, Б, С, Д величины переписывают в новые ячейки
памяти А+1, В+1, С+1, Д+1;
Ячейки А, В, С, Д очищаю и подготавливают для приема данных
на случай, если показания следующего датчика выйдут за пределы нормы;
Проводят опрос (0+1) - го датчика.
После завершения цикла опроса всех датчиков происходит печать
данных. Данные выдаются в виде таблицы, содержащей j строк и четыре столбца с
величинами соответственно.
На этом выполнение заданной программы прекращается. Через
промежуток времени, равный периоду опроса, эту программу вновь запускают для
обработки новых даных, поступающих от измерительных датчиков.
Алгоритм циклического опроса датчиков и сравнения их
показаний с нормой иногда модифицируют и контролируют граничные значения до
нескольких границ, соответствующих, например, предаварийной и аварийной
ситуации. В этом случае наряду с печатью данных одновременно подают сигнал
звуковой или световой индикации на пульт оператора.
6.
Экономическая часть
.1
Виды эффектов от внедрения
Проведение технико-экономического анализа требует выбора и
расчета ряда экономических показателей, позволяющих дать комплексную оценку
нового продукта. Рассмотрению этих показателей должна предшествовать
формулировка основных понятий экономической эффективности. Применительно к
экономике под эффектом понимается совокупность результатов, получаемых от
реализации определенных научно-технических или организационно-экономических
решений. В зависимости от целей и характера создаваемого продукта могут быть
получены различные виды эффектов. Каждый вид эффекта имеет свои особенности и
требует своих методов обработки количественных данных. Как правило, при
технико-экономическом анализе один вид эффекта выступает в качестве основного, остальные
- в качестве сопутствующих. Различают следующие виды эффектов: научный,
технический, организационный, экономический, социальный, экологический и
политический.
От внедрения разрабатываемой в данном проекте дистанционной
беспроводной системы может быть получено несколько видов эффектов.
Простота и надежность конструкции разрабатываемого
электронного устройства ведет к улучшению технико-эксплуатационных параметров
технического средства, что создает технический эффект от внедрения новшества.
За счет использования готовых промышленных модулей, сроки
производства данного продукта значительно сокращаются, так как работа сводится
к операциям сборки и настройки. Таким образом, можно говорить об экономическом
эффекте.
6.2
Расчет себестоимости прибора
Расчет затрат на производство разрабатываемого устройства на
этапе проектирования представляет определенные трудности, так как в этот период
отсутствует информация о трудоемкости и материалоемкости будущего изделия. Тем
не менее, создание конструктивно более совершенного изделия требует
обязательного комплексного анализа экономичности устройства, как в сфере
производства, так и в сфере эксплуатации. На величину себестоимости изделия
влияют самые разнообразные факторы (функциональная сложность схемы, применяемые
покупные радиоэлементы, особенности конструкции, качество материалов, объем
выпуска и другие).
Для расчета себестоимости изделия используем метод удельных
весовых затрат. Для этого необходимо иметь данные о структуре себестоимости
аналогичного изделия и выполнить детальный расчет одной из прямых статей затрат
по проектируемому варианту. Такой статьей для изделия может быть статья
«Комплектующие изделия и полуфабрикаты». Поскольку удельный вес данной прямой
статьи в себестоимости приборов является наибольшим, это дает возможность
получить весьма точный результат при расчете себестоимости проектируемого
изделия. Затраты по этой статье могут быть определены по спецификации к
электрической схеме и прейскурантам цен. При этом себестоимость определяется по
формуле 6.1.
 (6.1)
(6.1)
где Ск - затраты по данной статье, р.;
Ук - удельный вес данной статьи в себестоимости аналогичных
изделий, %.
Затраты по другим статьям могут быть рассчитаны по следующим
формулам:
по статье «Сырье и основные материалы»
 (6.2)
(6.2)
где Ум - удельный вес затрат на сырье и основные материалы в
полной себестоимости прибора-аналога%;
Ук - удельный вес затрат на комплектующие изделия и покупные
полуфабрикаты в полной себестоимости прибора-аналога%.
По статье «Основная заработная плата производственных рабочих»
 (6.3)
(6.3)
где Узп - удельный вес затрат по статье «Основная заработная плата
производственных рабочих» в полной себестоимости прибора-аналога, %.
Величина косвенных расходов (цеховых, общезаводских,
внепроизводственных)
 (6.4)
(6.4)
где УКР - удельный вес косвенных расходов в полной себестоимости
прибора-аналога%.
Полная себестоимость изделия находится по формуле (6.5).
 (6.5)
(6.5)
Для определения удельного веса статей прямых затрат и косвенных
расходов воспользуемся приложениями 7-10 [25]. Проектируемое изделие относится
к электронным приборам. Определим затраты на комплектующие и полуфабрикаты.
Затраты на покупные комплектующие изделия приведены в таблице
9.
Таблица 9 - Затраты на покупные комплектующие изделия
|
Наименование
|
Количество, шт.
|
Стоимость, руб.
|
Сумма, руб.
|
|
Конденсатор:
|
|
|
К50-68-35В-100мкФ
|
1
|
3,80
|
3,80
|
|
К50-68-25В-220мкФ
|
1
|
4,00
|
4,00
|
|
TECAP-16В-100мкФ
|
1
|
22,00
|
22,00
|
|
TECAP-10В-220мкФ
|
1
|
42,00
|
42,00
|
|
CC1206ZRY5V9BB684
|
9
|
1,40
|
12,60
|
|
CC0603ZRY5V9BB224
|
14
|
2,00
|
28,00
|
|
Микросхема:
|
|
|
ADM1485AR-REEL
|
1
|
32,20
|
32,20
|
|
MC34063AP
|
2
|
82
|
164
|
|
MC7805ECDT
|
1
|
10,92
|
10,92
|
|
ATmega32L
|
1
|
104,56
|
104,56
|
|
24LC512
|
1
|
29,00
|
29,00
|
|
Индуктивность CR431IVP
|
2
|
8,02
|
16,04
|
|
Фильтр BLM31AS60SN1L
|
2
|
2,55
|
5,10
|
|
Резистор: 6
|
|
|
RC1206FR-075K6
|
6
|
0,20
|
1,20
|
|
RC1206FR-70255RL
|
16
|
0,20
|
3,20
|
|
RC1206FR-07190RL
|
4
|
0,20
|
0,80
|
|
RC1206FR-071RL
|
4
|
0,20
|
0,80
|
|
RC0603FR-0713K3L
|
5
|
0,09
|
0,45
|
|
RC0603FR-0718K1L
|
5
|
0,08
|
0,40
|
|
RC0603FR-0713K6L
|
5
|
0,09
|
0,45
|
|
RC0603FR-07147KL
|
2
|
0,08
|
0,16
|
|
RC0603FR-073K42C
|
9
|
0,07
|
0,63
|
|
Реле CPC1117N
|
1
|
30,53
|
30,53
|
|
Диод:
|
8,1 8,1
|
|
BAS32L.115
|
17
|
0,75
|
12,75
|
|
CLM1-WKW-CVaWb153
|
1
|
6,32
|
6,32
|
|
PESD5V0L4VG.115
|
3
|
3,82
|
11,46
|
|
MBRS1100T3G
|
2
|
3,40
|
6,80
|
|
KAA-3528ESGC
|
4
|
5,27
|
21,08
|
|
MRS3100T3G
|
1
|
7,64
|
7,64
|
|
Транзистор:
|
|
|
BC817
|
2
|
6,00
|
12,00
|
|
BC807
|
1
|
4,90
|
4,90
|
|
Разъем PLS-10
|
2
|
0,76
|
1,52
|
|
Клемник
|
8
|
2,89
|
23,12
|
|
Кварцевый резонатор
|
1
|
7,57
|
7,57
|
|
Модуль MO-CC2420-Z
|
1
|
1500
|
1500
|
|
Корпус
|
1
|
82
|
82
|
|
Итого:
|
2210
|
|
|
|
|
|
Найдем удельные веса статей затрат, используя таблицу
приложения 9 [25]:
УМ = 6%
УК = 48%
УЗП = 12%
УКР = 34%
Используя формулы (6.2) - (6.4) находим соответствующие
статьи затрат:
 руб.
руб.
 руб.
руб.
 руб.
руб.
Полная себестоимость изделия составит:

6.3 Оценка конкурентоспособности
Конкурентоспособность изделия - это комплексный показатель,
определяющий его возможность удовлетворить требования потребителей на
конкретном рынке при сохранении или увеличении реальных доходов производителя
изделия.
Для оценки конкурентоспособности изделия необходимо отобрать
товары-аналоги, обладающие наиболее высокими технико-экономическими
характеристиками. Затем необходимо из этих характеристик отобрать только те, по
которым есть различия. Следующий этап оценки конкурентоспособности заключается
в определении весомости (значимости) каждого параметра.
После этого производится расчет относительного показателя
качества изделия КК, затем рассчитывается показатель относительной
конкурентоспособности по отношению к образцу ККСП.
Относительные технические, эргономические, эстетические и
другие параметры составляют в совокупности относительный показатель качества
изделия:
 (6.6)
(6.6)
гдеП1, П2,… Пn - относительный параметр проектируемого изделия;
К1, К2,… Кn - коэффициент весомости (значимости) соответствующего параметра.
Коэффициенты весомости параметров обычно определяются в долях
единицы. Для определения коэффициентов весомости можно использовать метод
экспертных оценок. В качестве экспертов могут быть привлечены специалисты
предприятий, торговые работники, преподаватели кафедры. Значение коэффициента
весомости i-го параметра может быть определено по
формуле:
 (6.7)
(6.7)
где К1экс, К2экс,… Кnэкс - оценка i-го параметра
каждым экспертом;
n - количество экспертов.
Определим конкурентоспособность разрабатываемого изделия. Сначала
составим таблицу показателей качества изделия и аналога, затем таблицу
стоимостных характеристик устройств.
В таблице 10 приведены показатели качества разрабатываемого
устройства и аналога «LONTA».
Таблица 10 Оценка конкурентоспособности проектируемого
прибора
|
№ п/п
|
Показатели качества
|
Проект. изделие
|
Аналог LONTA
|
Коэффициент весомости
|
|
1
|
Суммарный диапазон измерения тока, мА
|
3
|
1,5
|
0,1
|
|
2
|
Предел измерения, В
|
24
|
12
|
0,1
|
|
3
|
Количество подключаемых датчиков
|
60
|
30
|
0,1
|
|
4
|
Внутренняя память данных, к / Байт
|
256
|
16
|
0,2
|
|
5
|
Интерфейс для вывода данных на компьютер, балл
|
3
|
2
|
0,05
|
|
6
|
Объём корпуса прибора, ×10-6м3
|
604
|
890
|
0,1
|
|
7
|
Масса, г
|
195
|
258
|
0,05
|
|
8
|
Потребляемая мощность, Вт/час
|
3
|
4,8
|
0,1
|
|
9
|
Дизайн, балл
|
5
|
3
|
0,1
|
|
10
|
Средняя наработка на отказ, тыс. ч.
|
8000
|
10000
|
0,1
|
Таблица 11 - Стоимостные характеристики приборов
|
№ п/п
|
Стоимостные характеристики
|
Проектир. изделие
|
Аналог LONTA
|
|
1
|
Продажная (розничная) цена, тыс. руб.
|
4,6
|
6,4
|
|
2
|
Суммарные расходы на весь срок службы, тыс.
руб.
|
6,8
|
8,2
|
На основе данных таблицы 10 составляется таблица 12, в
которой указывается относительные значения показателей качества с учётом
коэффициентов весомости.
Таблица 12 - Относительные значения показателей качества
|
№ п/п
|
Показатели качества
|
Проектируемое изделие
|
Результат
|
Аналог LONTA
|
|
1
|
Суммарный диапазон измерения тока, мА
|
 0,450,1 0,450,1
|
|
|
|
2
|
Предел измерения, В
|
 0,20,1 0,20,1
|
|
|
|
3
|
Количество подключаемых датчиков
|
 0,20,1 0,20,1
|
|
|
|
4
|
Внутренняя память данных, к / Байт
|
 0,80,2 0,80,2
|
|
|
|
5
|
Интерфейс для вывода данных на компьютер, балл
|
 0,0750,05 0,0750,05
|
|
|
|
6
|
Объём корпуса прибора, ×10-6м3
|
 0,0680,1 0,0680,1
|
|
|
|
7
|
Масса, г.
|
 0,010,05 0,010,05
|
|
|
|
8
|
Потребляемая мощность, Вт.
|

|
0,062
|
0,1
|
|
9
|
Дизайн, балл
|

|
0,16
|
0,1
|
|
10
|
Средняя наработка на отказ, тыс. ч.
|
 0,080,1 0,080,1
|
|
|
|
Сумма
|
2,1
|
1
|
Суммируя отдельные относительные показатели качества
проектируемого изделия, получаем, что интегральный показатель качества КК=2,1,
в то время как у аналога он равен единице. Таким образом, можно сделать вывод,
что проектируемое изделие превосходит аналог как в целом по качеству, так и по
отдельным параметрам.
Определим конкурентоспособность изделия как отношение
интегрального показателя качества к цене или к суммарным расходам за весь срок
службы метеостанции. Проектируемое изделие является более конкурентоспособной
по сравнению с аналогичным. Показатели конкурентоспособности на единицу цены
составляют соответственно 0,456 (2,1:4,6) и 0,156 (1:6,4). А в расчете на
полную цену потребления они составляют соответственно 0,309 и 0,122 [25].
Вывод: Проектируемое изделие не дороже аналога, качество и
основные характеристики превосходят аналогичные устройства, что показывают
относительные показатели качества, следовательно, оно будет конкурентоспособным
товаром на рынке.
Заключение
В дипломном проекте выполнен обзор современных технологий
иосвязей и проводного интерфейса передачи данных, выбрана наиболее рспективная
система передачи данных по технологии ZigBee.
Выполнены схемы: структурная на формате А1, электрическая
инципиальная на формате А1, трассировка печатной платы на форматах 1, сборочный
чертеж печатной платы на формате А1, чертеж основания на формате А1, сборочный
чертеж устройства на формате А1, плакат модель объекта охраны на формате А1,
плакат подключения оснастки формате А3
В технологической части разработан технологический процесс,
проверены характеристики по точности.
Согласно задания выполнены мероприятия по экономике и
безопасности жизнедеятельности.
Проведенные расчеты показали, что полученные характеристики
соответствуют требованиям технического задания.
Список использованной литературы
1. Крюков В.В. Информационно-измерительные
системы. Учебное пособие. - Владивосток: ВГУЭС, 2000. - 102 с.
2. http://gete.ru
. Maxim's Application Note 763 (январь 2001 года), пер. И.Н.
Биpюкoв.http://www.gaw.ru
. Руководство по эксплуатации ППКОП
01040510119-16/256-1
5. http://konvir.ru
6. http://ru.wikipedia.org/wiki
7. http://www.mt-system.ru
8. http://www.wireless-e.ru
9. http://book.itep.ru
. CHIP NEWS №1-2010
. http://www.ebwise.com
. http://catalog.compel.ru
13. ГОСТ 20.39.108-85 «Комплексная система
общих технических
требований. Требования по эргономике, обитаемости и технической
эстетике. Номенклатура и порядок выбора»
. Леухин В.Н., Павлов Е.П. Разработка
лицевой панели
радиоэлектронного устройства: Учебное пособие. - Йошкар - Ола,
МарГТУ, 1998. -98с.
15. http://manometer-ufa.ru
16. Каленкович Н.И. Механические воздействия и
защита радиоэлектронных средств. - М.: Радио и связь, 1993. -326с.
17. Леухин В.Н., Павлов Е.П. Проектирование
функционального узла ив печатной плате: Учебное пособие. - МарГТУ. 1996. -90с.
18. http://gostexpert.ru
19. Справочник конструктора радиоэлектронной
аппаратуры. Справочник под ред. Р.Г. Варламова - М.: Советское радио,
198О.-480с.
20. Андреев В.А., Устройства на микросхемах.
Устройства автоматики: Справочное пособие. - СПб.: «Лань», 2003.-165с.
21. Захаров Ю.В. Управление качеством и
надежность электронных
средств: Учебное пособие. - Йошкар-Ола: МарГТУ, 2002.-80с.
22. Черняк СЛ. Справочная книга по
светотехнике - М.: Энергоатомиздам, 1983. - 472 с.
. Павлов Е.П., Санникова И.Т. Основы
проектирования электронныхсредств: Курс лекций. - Йошкар-Ола: МарГТУ,
2004.-308с.
. Пушкарев О. ZigBee-модули ХВее с поддержкой
MESH-
топологии//Новости электроники, 2007, №16.
25. Шульмин В.А., Усынина Т.С. Экономическое
обоснование
дипломных проектах: Учебное пособие. - Йошкар-Ола: МарГТУ, 2004.-164с.
26. http://progost.ru
27. http://www.gosthelp.ru
28. http://www.docHst.ru
29. http://www.ecobest.ru