|
n0, об/мин
|
PДВ.Н, кВт
|
При
номинальной нагрузке
|
Jдв, кг∙м2
|
|
|
|
s ном, %
|
сosцн
|
зн, %
|
|
|
970
|
380
|
18,5
|
3
|
0,84
|
88?5
|
0,11
|
Моделирование асинхронного двигателя будем
производить в абсолютных единицах. Параметры, необходимые для расчета в среде Matlab,
были рассчитаны ранее:
активное сопротивление статорной
обмотки: 
активное сопротивление обмотки
ротора, приведенное к обмотке статора: 
индуктивность обмотки статора:

индуктивность обмотки ротора,
приведенная к обмотке статора:


На рисунке 2 приведен блок
параметров имитационной модели АД:

Рисунок 2 - Параметры исследуемого АД в
программе Matlab
На рисунке 3 приведены переходные характеристики
момента М = f(t)
и скорости щ = f(t):

Рисунок 3 - Диаграммы электромагнитного момента
Мэм(t) и скорости
вращения двигателя щ(t)
На рисунке 4 представлена динамическая
механическая характеристика АД:
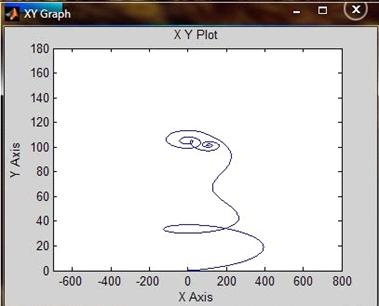
Рисунок 4 - Динамическая характеристика
двигателя 4А132М4У3
асинхронный электродвигатель
нагрузка динамический

Рисунок 5 - Статическая механическая
характеристика для двигателя 5а225s8k
На рисунке 6 показано, как ведёт себя вектор
потокосцепления, характеризующий магнитное поле машины.

Рисунок 6 - Динамическая переходная
характеристика вектора потокосцепления Ш
На рисунках 7 приведены графики переходных
процессов для тока статора I1
= f(t)
и тока холостого хода I0
= f(t).

Рисунок 7 - Графики переходных процессов для
тока статора I1 = f(t) и тока холостого хода I0 = f(t)
Из графика на рис. 7 определим ток холостого
хода и ток статора двигателя:
где  - амплитудное значение тока статора
холостого хода.
- амплитудное значение тока статора
холостого хода.

Рисунок 8 - Естественные электромеханические
характеристики электродвигателя 6А160L6
Вывод: из полученных результатам видно, что при
пуске двигателя присутствуют значительные колебания момента. Как можно увидеть
из рисунков 4 и 5 динамическая характеристика явно отличается от статической
характеристики электродвигателя - на рисунке 4 наблюдаются колебания момента,
особенно при пуске и на выходе установившегося значения скорости, что также
отображено на характеристиках переходных процессов. Таким образом, учет только
статических механических характеристик может привести к искажению характера
динамических нагрузок при пусках асинхронных двигателей, что впоследствии может
негативно влиять на механические части электропривода.
После проверки двигателя можно утверждать, что
параметры двигателя были рассчитаны верно и модель работает нормально.