Маркшейдерские работы при разработке месторождений полезных ископаемых открытым способом
Министерство образования Российской
Федерации
Уральский государственный горный
университет
Кафедра маркшейдерского дела
Курсовая работа
по дисциплине «маркшейдерское дело»
Маркшейдерские работы при разработке
месторождений полезных ископаемых открытым способом
Выполнил:
студент группы МД-3-2
Хайруллин
М.М.
ВАРИАНТ 5
Преподаватель:
к.т.н. профессор
Голубко Б.П.
Екатеринбург 2011
СОДЕРЖАНИЕ
Введение
. Опорные сети на карьерах.
.1 Плановые опорные сети на карьерах.
.2 Высотные опорные сети на карьерах.
. Маркшейдерские съемочные сети на карьерах
.1 Вариант создания съемочного обоснования на карьерах
методом теодолитных ходов.
.2 Определение планового положения пунктов съёмочной сети
методом геодезических засечек.
.2.1 Прямая геодезическая засечка.
.2.1.1 Решение прямой геодезической засечки по формулам
котангенсов
.2.1.2 Решение прямой геодезической засечки по формулам
тангенсов дирекционных углов.
.2.2 Обратная геодезическая засечка.
.2.4 Линейная геодезическая засечка.
.2.4.1 Решение линейной засечки по проекциям сторон
.3 Вариант создания съемочного обоснования на карьерах
полярной засечкой.
.4 Аналитическая фототриангуляция
.5 Определение высотных отметок пунктов съемочного
обоснования.
. Маркшейдерские работы при проходке траншей.
. Маркшейдерские работы при проведении буровзрывных работ
.1 Составление плана-проекта на буровзрывные работы.
Список используемой литературы
Введение
Курсовая работа включает в себя комплекс расчётно-графических работ,
выполняемых маркшейдером при разработке месторождений полезных ископаемых
открытым способом.
Основой при работе маркшейдера в карьере является создание опорных и
съёмочных сетей. Опорные и съёмочные сети служат геометрической основой для
обеспечения всех видов съёмок, проводимых при эксплуатации месторождения.
Существует несколько способов выполнения указанных работ. В курсовом
проекте рассмотрены способы развития планового съёмочного обоснования прямой и
обратной геодезическими засечками, линейной засечкой.
Рассмотрен вопрос проходки траншей, целью которой является установление
транспортно-грузовой связи между горизонтами разработки и пунктами приёма
горной массы на поверхности или в карьере.
Составлен проект буровзрывных работ, в котором выполнены все необходимые
расчёты для подготовки блока к взрыванию.
В курсовой работе использовались данные, приведённые в методическом
пособии.
1. Опорные сети на карьерах
.1 Плановые опорные сети на карьерах
Геометрической основой для производства всех видов съемки
(маркшейдерской, геологической, геодезической и топографической) на земной
поверхности и в карьере служат: государственные геодезические сети
(триангуляция, полигонометрия, трилатерация 1-го, 2-го, 3-го и 4-го классов);
сети сгущения (триангуляция, полигонометрия 1-го и 2-го разрядов) и высотные сети
I, II, III и IV классов.
Государственная геодезическая сеть обеспечивает распределение координат
на территории государства и является исходной для построения других сетей.
Работы по созданию маркшейдерских опорных геодезических сетей на карьере
выполняются по согласованию и разрешению Ростехнадзора. В качестве исходных
пунктов для построения опорных сетей служат пункты государственной
геодезической сети и сети сгущения.
Координаты и высоты всех видов опорных сетей вычисляются в принятых в
стране системах координат в проекции Гаусса и в Балтийской системе высот.
Наибольшее распространение на горных предприятиях в качестве опорных
сетей получили сети 4-го класса, сети сгущения 1-го и 2-го разрядов и
нивелирования III и IV классов, создаваемые на основе пунктов государственной
геодезической сети путем перехода от большего к частному (от высшего разряда к
низшему) в таблице 1 приведены характеристики сетей триангуляции 4-го класса,
1-го и 2-го разрядов.
Таблица 1
|
Показатели
|
4-й класс
|
1-й разряд
|
2-й Разряд
|
|
1
|
2
|
3
|
4
|
|
Длина стороны треугольника,
км, не более Минимально допустимая величина угла: в сплошной сети связующего
в цепочке треугольников во вставке Число треугольников между исходными
сторонами или между исходными пунктом и исходной стороной, не более Минимальная
длина исходной стороны, км Средняя квадратическая погрешность измерения
углов, вычисленная по невязкам треугольников Предельная невязка в
треугольнике Относительная погрешность исходной (базисной) стороны, не более
Относительная средняя квадратическая погрешность определения длины стороны в
наиболее слабом месте, не более
|
5 20º - - - - 2" 8" 1:200 000 -
|
5 20º
30º 30º 10 1 5"
20" 1:50 000 1:20 000
|
3 20º
30º 20º 10 1 10"
40" 1:20 000 1:10 000
|
Характеристика сетей полигонометрии 4-го класса, 1-го и 2-го разряда
приведена в таблице 2.
Таблица 2
|
Показатели
|
4-й класс
|
1-й разряд
|
2-й разряд
|
|
1
|
2
|
3
|
4
|
|
Придельная длина хода, км:
отдельного между исходной и узловой точками между узловыми точками Предельный
периметр полигона, км Длина сторон хода, км: наибольшая наименьшая средняя
расчетная Число сторон в ходе, не более Предельная относительная невязка хода
Средняя квадратическая погрешность измерения угла (по невязкам в ходах и
полигонах), с Угловая невязка хода или полигона, не более, где n - число углов
в ходе, с
|
10 7 5 30 2 0,25 0,50 15
1:25 000 2 5√n
|
5 3 2 15 0,8 0,12 0,30 15
1:10 000 5 10√n
|
3 2 1,5 9 0,35 0,08 0,20
15 1:5 000 10 20√n
|
В отдельных случаях при привязке ходов полигонометрии к пунктам
государственной геодезической сети с использованием светодальномеров длины
примычных сторон хода могут быть увеличены на 30%.
В порядке исключения в ходах полигонометрии 1-го разряда длинной до 1 км
и в ходах полигонометрии 2-го разряда длиной до 0,5 км допускается абсолютная
линейная невязка 10 см.
Число угловых и линейных невязок, близких к предельным, допускается не
более 10%.
Допускается увеличение длин ходов полигонометрии 1-го и 2-го разряда на
30% при условии определения дирекционных углов сторон хода с точностью 5 -
7" не реже чем через 15 сторон и не реже чем через 3 км.
Расстояние между пунктами параллельных полигонометрических ходов 1-го
разряда, по длине близких к предельным, не должно быть менее 1,5 км. При
меньших расстояниях ближайшие пункты связываются ходом того же разряда.
Если пункты хода полигонометрии 1-го разряда относят меньше чем на 1,5 км
от пунктов параллельного хода полигонометрии 4-го класса, то между этими ходами
осуществляется связка проложением хода 1-го разряда.
Предельная длина хода для всех сетей, прокладываемых с использованием
электронных тахеометров и светодальномеров, должна быть равна:
для ходов между исходным и узловым пунктами 2/3 отдельного хода,
определенного от числа сторон (n);
для ходов между узловыми пунктами 1/2 отдельного хода;
при уменьшении числа сторон (n) отдельного хода соответственно 2/3 и 1/2
Предельная длина сторон при измерении электронным тахеометрами и
светодальномерами не устанавливается но необходимо избегать перехода от
наименьших сторон к максимальным.
Опорные сети обеспечивают распространение геометрической основы на
территории карьерного поля и являются исходными для построения съемочных сетей
и маркшейдерской съемки всех видов работ на земной поверхности и в карьере.
Плотность опорных сетей определяется количеством пунктов на 1 км²
и должна быть доведена
сетями сгущения не менее чем до 4-х пунктов на застроенных территориях, а на
незастроенных - до 1 пункта. Исходными пунктами для сетей сгущения 1-го разряда
служат пункты государственной геодезической сети 1-4-го классов, а для сетей
2-го разряда - пункты 1-4-го классов и сети сгущения 1-го разряда.
Измерение углов в триангуляции 1-го и 2-го разрядов производиться
круговыми приемами теодолитами класса Т2, Т5 с соблюдением допусков,
приведенных в таблице 3
Таблица 3
|
Показатели
|
Теодолит Т2
|
Теодолит Т5
|
|
1-й разряд
|
2-й разряд
|
1-й разряд
|
2-й разряд
|
|
Число приемов Предельная
невязка при замыкании горизонта, с Предельная невязка в направлениях из
разных приемов, с
|
3 8 8
|
2 8 8
|
4 12 12
|
3 12 12
|
Опорные сети, создаваемые методом полигонометрии, строятся в виде
замкнутых, разомкнутых и висячих, а по форме вытянутых и ломанных ходов,
опирающихся на исходные пункты (пункты с известными координатами). Группа ходов
одного разряда точности, пересекающихся в узловых точках и уравниваемых
совместно, называется системой. Система замкнутых ходов называется системой
полигонов: свободной при наличии одного исходного пункта и одной исходной
стороны и несвободной при наличии нескольких исходных пунктов сторон. Система
незамкнутых ходов называется системой с узловыми точками (пунктами) с одной,
двумя и большим числом узловых точек.
Пункты опорных сетей 4-го класса, 1-го и 2-го разрядов закрепляются
долговременными и частично временными знаками. Долговременные знаки
закрепляются на отдельных участках группами не менее трех подряд и в местах
узловых точек. Временные пункты в виде железных труб и стержней длинной 0,5-1,0
м забиваются в твердый грунт и окапываются канавкой. На пунктах 4-го класса и
1-го разряда устанавливаются наружные геодезические знаки в виде простых
пирамид и сигналов. На пунктах 2-го разряда допускается устанавливать вехи.
Конструкции наиболее распространенных центров и знаков представляют собой
забетонированный металлический штырь диаметром 25-30 мм, зазубренный или
загнутый в нижней части в виде крючка. В головке штыря высверливается
отверстие, наносится керн или крестообразная насечка, фиксирующие центр пункта.
Допускается керн зачеканивать медной проволокой.
С учетом разнообразия маркшейдерских работ на карьере и их объемов на
территории каждого из них, в зависимости от размеров и глубины разработки,
должно быть не менее двух пунктов опорной сети, а на крупных - трех пунктов.
Создание опорных сетей проводиться на стадиях разведки карьера. В период
эксплуатации, по мере развития горных работ, часть пунктов уничтожается и
требуется периодическое пополнение опорной сети.
1.2. Высотные
опорные сети на карьерах.
Высотные опорные сети на карьерах создаются нивелированием III и IV классов, отметки которых определяются от сетей I и II классов соответственно в единой Балтийской системе высот на
всей территории страны.
Сети нивелирования III и IV классов прокладываются для высотного
обеспечения маркшейдерских съемок и решения инженерных задач внутри полигонов
высшего класса в виде отдельных ходов или полигонов, опирающихся на исходные
реперы, или в виде систем (линий) с узловыми пунктами.
Нивелирование III класса
выполняется в прямом и обратном направлениях. Нивелирование IV класса производится в одном
направлении. Основные характеристики высотных опорных сетей, нивелирования III и IV классов приведены в таблице 4.
Таблица 4
|
Показатели
|
III класс
|
IV класс
|
|
Периметр полигона, длина
линий, не более, км Допустима невязка в полигонах и по линиям, мм Увеличение
трубы нивелира, не менее, крат Тип нивелира Тип рейки Длина визирного луча, м
Допустимое неравенство плеч визирных лучей, м Высота визирного луча над
земной поверхностью, не менее, м Допустимое расхождение превышений αдоп ≤ ħпр - ηобр, мм, где α - периметр полигона или длина линии, км.
|
150 10√L
30 Н3, Н3К Штриховые, шашечные 3-х метровые, двухсторонние 75 - 100 2 0,3 10√α
|
50 20√L
25 Н3, Н3К Шашечные, 3-х метровые, двухсторонние 100 - 150 5 0,2 20√α
|
При решении инженерных задач на промышленных и строительных площадках
нивелирование III и IV классов производится по особой программе. В этом случае
уменьшается длина хода и увеличивается частота установки знаков. Длина линий
нивелирования III класса не должна превышать 10 км на
застроенных и 15 км на незастроенных участках. Длина линий нивелирования IV класса не должна превышать 4 км
между пунктами высшего класса и 2 км - между узловыми точками. Периметры
полигонов в сетях нивелирования IV
класса в этом случае не должны превышать 12 км. Линии нивелирования
закрепляются на местности постоянными знаками (грунтовыми, скальными и стенными
реперами). В качестве временных знаков нивелирования могут быть включены пункты
плановой сети.
Маркшейдерская служба карьера обязана вести журнал учета состояния
опорной сети. Контроль за своевременным выполнением и качеством работ
возлагается на маркшейдерскую службу вышестоящей организации. Государственный
надзор осуществляют органы Ростехнадзора.
2. Маркшейдерские съемочные сети на карьерах
Маркшейдерскими съемочными сетями на карьерах называют
сеть пунктов, равномерно расположенных на поверхности и внутри карьера,
используемых для съемки горных выработок и решения различных горнотехнических
задан. Съемочные сети создают на основе пунктов опорных сетей. Число пунктов
съемочных сетей состоит из основных пунктов и определяемых в дополнение к ним
съемочных точек. Определение пунктов и точек съемочного обоснования в
пространстве включает расчет плановых координат и высотных отметок. Как
правило, решение этих двух независимых задач осуществляется одновременно.
Выбор способа и схемы расположения пунктов и точек
съемочного обоснования зависит от размеров, конфигурации, глубины карьера,
системы разработки и рельефа местности, Количество пунктов съемочного
обоснования, включая и пункты опорных сетей, на карьере может быть различным, и
число их определяется исходя из методов и масштаба съемки. Количество основных
пунктов определяется в процессе рекогносцировки, съемочных точек в процессе
съемки, в зависимости от способа и масштаба съемки и сложности контуров, но во
всех случаях должно быть обеспечено соблюдение оптимальных параметров
применяемого метода съемки, например, удаленность снимаемого объекта (пикета)
от прибора при тахеометрическом методе съемки.
Средние квадратические погрешности положения пунктов
съемочного обоснования относительно ближайших пунктов опорных сетей не должны
превышать 0,4 мм на плане в принятом масштабе съемки при определении плановых
координат и 0,2 м по высоте.
Съемочная сеть на карьерах закрепляется постоянными и
временными центрами. Постоянные центры (основные пункты) закрепляются в местах,
обеспечивающих длительную их сохранность для многократной съемки. Это нерабочие
уступы, старые устоявшиеся внутренние и внешние отвалы. Временные центры
(съемочные точки) закрепляются в границах рабочей части карьера, в том числе на
рабочих уступах и на новых отвалах и используются для небольшого количества
съемок. Конструкция постоянных знаков представляет собой металлический центр
(труба, рельс, стержень), забетонированный в скважину или в котлован на глубину,
превышающую глубину промерзания на 0,5 м, но не менее 1м. Центры временных
знаков - забивные из металла или деревянных кольев в зависимости от крепости
пород - забиваются вровень с поверхностью земли на глубину 0,2 - 0,5 м.
2.1 Вариант создания съемочного обоснования на карьерах методом
теодолитных ходов
Теодолитные ходы прокладываются от пунктов опорных сетей в виде замкнутых
полигонов или между пунктами в виде разомкнутых ходов. В необходимых случаях
допускается определять положение одного пункта висячим ходом из одной стороны
длинной не более 400 м. на исходных пунктах измеряют примычные углы на два
направления опорной сети. Их сумма не должна отличаться от значения жестокого
угла больше чем на 1'.
Предельная угловая невязка теодолитного хода 45"√n, где n - число измеренных углов в ходе.
Длины сторон теодолитного хода выбираются, как правило не менее 100 м и
не более 400 м. Длина теодолитного хода в целом не должна быть более 1,8; 2,5 и
6,0 км при съемке в масштабе 1:1000; 1:2000; 1:5000. Стороны измеряются дважды
с относительной ошибкой 1:1500. Допустима линейная невязка всего хода 1:3000.
При необходимости длины сторон теодолитного хода разрешается определять
косвенно или аналитически.
Данный способ определения длин линий при прокладке теодолитного хода
удобен, когда применение рулетки затруднительно, а порой и невозможен при
наличии на участке механизмов, транспортных средств, навалов пород и т. п.
Использование светодальномеров для решения частных задач не всегда рационально,
или просто они отсутствуют.
Применение этого способа сводится к измерению только углов, что на
практике не вызывает затруднений.
Пример решения теодолитным ходом
Точка II
х = 704.105 м
у = 1657.641 м
ST1
х = 682.590 м
у = 1811.645 м
III
х = 722.706 м
у = 1909.220 м
угол I-II-P = 175º8´
угол угол I-II-P = 60,938º угол II-ST1-P = 82,038º´
угол I-II-P = 175º8´
Схема теодолитного хода

Решение
По теореме синусов вычисляем длин теодолитного хода
sin (60,938+82,038)(р-I-st1)=255,75 --------------------------=155,91 м
sin(82,038)
sin
(60,938)(st1-p)=255,75------------------- =225,80 м
sin(82,038)
sin (67,660)(st1-II)=255,75-------------------
=1055,5 м
sin(84,608)
Находим точку Р методом линейной засечки
Р координаты
Х = 682.590 мм
У = 1811.645 мм
2.2 Определение планового положения пунктов съёмочной сети методом
геодезических засечек
Геодезические засечки - способ определения координат отдельных пунктов по
необходимому числу измеренных углов и линейных величин.
Основными элементами вычисления засечек являются решения треугольников. В
зависимости от методики измерений и вычислений геодезические засечки
называются: прямая, обратная (задача Потенота), обратная по известным пунктам и
вспомогательной точке (задача Ганзена) и линейная.
Расчёт координат определяемых пунктов ведётся из двух треугольников в
прямой засечке и из двух вариантов - в обратной. Допустимое расхождение из двух
решений не должно превышать 0,6 мм. на плане в масштабе съёмки. Углы между
линиями при определяемом пункте на исходные не должны быть менее 30 и более
1500.
Расстояния между исходными пунктами и определяемой точкой не должна
превышать 1, 2, 3 км соответственно в масштабах съёмки 1:1000, 1:2000, 1:5000.
В курсовой работе рассмотрено несколько вариантов решений прямой,
обратной и линейной геодезических засечек.
.2.1 Прямая геодезическая засечка
Для решения прямой геодезической засечки на исходных
пунктах I,II,III (рис. 1)
измеряются углы r1 и r2 в одном треугольнике и г3, г4 во
втором. Для определения координат пункта Р1 достаточно решения одного
треугольника по известным координатам Х1,У1,ХII,УII пунктов I,II и измеренным углам г1, г2. Решение второго треугольника по
известным координатам ХII,УII,XIII,УIII
(табл. 5) и измеренным углам г3, г4 необходимо для контроля.
Известны несколько способов решения прямой засечки.
Наиболее распространенные из них два: по формулам котангенсов измеренных углов
и тангенсов дирекционных углов.
2.2.1.1 Решение прямой геодезической засечки по
формулам котангенсов
1. Для решения использовались известные и измеренные исходные данные
приведённые в методическом пособии.
Таблица №5
|
Известные исходные данные
|
|
Х
|
Y
|
|
Пункт I
|
25
|
55
|
|
Пункт II
|
225
|
115
|
|
Пункт III
|
235
|
295
|
|
Пункт IV
|
205
|
465
|
2. На местности был заложен пункт съёмочной сети Р1 и измерены
необходимые углы.
|
Измеренные исходные данные
|
r1
|
71.331
|
ctg (r1)
|
0,338
|
|
r2
|
56.290
|
ctg (r2)
|
0,667
|
|
r3
|
53.592
|
ctg (r3)
|
0,768714
|
|
r4
|
80.941
|
ctg (r4)
|
0.159
|
|
γ1
|
52.379
|
ctg (γ1)
|
0.7701
|
|
γ2
|
45.467
|
ctg
(γ2)
|
0.983
|
r1 + r2 + γ1 = 1800 r3
+ r4 + γ2 = 1800
71.331+56.290+52.379= 1800 53,592+80.941+45,467 = 1800
рис.1

. Из треугольника I - II - Р1 имеем:
Х2 ctg (r1) + Х1 ctg (r2) + Y1 - Y2
ХР1 =
------------------------------------------------;
ctg (r1) + ctg (r2)
225×0,338+25×0,667+55-115
ХР1 = ------------------------------------------------- = 32.562 м.
0,667+0.338
Y2 ctg (r1) + Y1 ctg (r2) - Х1 + Х2
YР1 =
------------------------------------------- ;
сtg (r1) + ctg (r2)
115×0.338+55×0,667-25+225
YР1 =
---------------------------------------------- = 274.184 м.
0,667+0.338
. Для контроля из этого же треугольника вычисляем уже известные
координаты одного из пунктов, используя вычисленные координаты пункта Р1.
|
X1=
|
XР1 ctg(r2)+XÐÐctg(γ1)+YÐÐ-YР1
|
|
Y1=
|
YР1 ctg(r2)+YÐÐctg(γ1)-XÐÐ+XР1
|
|
ctg(r2)+ctg(γ1)
|
|
|
ctg(r2)+ctg(γ1)
|
32.562×0,667+225×077+115-274.184
Х1 = ------------------------------------------------------------ =
24,918 м.
0,770+0.667
274,184×0,667+115×0,770-225+32,529
Y1 =
-------------------------------------------------------- = 54,956 м.
0,770+0,667
. Из треугольника II - III- Р1 имеем:
|
XP1=
|
XÐÐÐctg(r3)+XÐÐctg(r4)+YÐÐ-YÐÐÐ
|
|
YP1=
|
YÐÐÐctg(r3)+YÐÐctg(r4)-XÐÐ+XÐÐÐ
|
|
ctg(r4)+ctg(r3)
|
|
|
ctg(r4)+ctg(r3)
|
235×0,7375+225×0,159+115-295
ХР1 =------------------------------------------------------- = 32,544 м.
0,159+0,7375
295× 0,7375+115×0,15946-225+235
YР1 =
-------------------------------------------------- = 274,149 м.
0,159+0,7375
. Аналогично выполняем контроль:
|
XÐÐ=
|
XР1 ctg(r4)+XÐÐÐctg(γ2)+YÐÐÐ-YР1
|
|
YÐÐ=
|
YР1 ctg(r4)+YÐÐÐctg(γ2)-XÐÐÐ+XР1
|
|
ctg(r4)+ctg(γ2)
|
|
|
ctg(r4)+ctg(γ2)
|
32,544×0,159+235×0,983+295-274,149
XÐÐ =
-------------------------------------------------------- =225,278 м.
0.159+0.983
274.149×0,159+295×0,983-235+32.544
YÐÐ =
------------------------------------------------------ = 114,939 м.
0.159+0.983
. Из решения 2-х треугольников имеем:
Координаты пункта Р1 из треугольника I - II -
Р1
ХР1 = 32,562 м. YР1 = 274,184 м.
Координаты пункта Р1 из треугольника II -III - Р1
ХР1 = 32,544 м. YР1 = 274,149 м.
Тогда разница между координатами,
∆ХР1 = 0.018м ∆YР1 = 0,035м
которая не превышает 0,6мм в плане в масштабе съёмки (для масштаба 1:2000
∆Х, ∆YР1≤
1,2 м.)
Окончательные координаты точки Р1, полученные решением прямой
геодезической засечки по формулам котангенсов измеренных углов принимаем как
среднее значение полученное из двух решений:
ХР1 = 32,553м. YР1 = 274,167м.
. Оценка точности планового положения пункта Р1 характеризуется
среднеквадратической погрешностью относительно пунктов опорной сети, величина
которой не должна превышать 0,4мм на плане масштабе съёмки.
Оценка точности планового положения пункта Р1
характеризуется среднеквадратической погрешностью относительно пунктов опорной
сети, величина которой не должна превышать 0,4 мм на плане в масштабе съемки
/1/ (для масштаба 1:2000 МР ≤ 0,8 м):
Оценка точности планового положения пункта Р1
характеризуется среднеквадратической погрешностью относительно пунктов опорной
сети, величина которой не должна превышать 0,4 мм на плане в масштабе съемки
/1/ (для масштаба 1:2000 МР ≤ 0,8 м):
Для треугольника Ð-ÐÐ-Р1
|
МР1=±
|
m"β
|
×
В1
|
√sin2(r2)+
sin2(r1)
|
=0,0031
|
|
ρ"
|
|
sin2(γ1)
|
|
Для треугольника ÐÐ
-ÐÐÐ-Р1
|
МР2=±
|
m"β
|
×
В2
|
√sin2(r4)+
sin2(r3)
|
=0,0032
|
|
ρ"
|
|
sin2(γ2)
|
|
где mβ - средняя квадратическая ошибка
измерения углов, принимаем
mβ
=15" ; В1 В2 -
базис прямой засечки (расстояние между пунктами опорной сети) определяются
решением обратной геодезической задачи
В результате средняя квадратическая погрешность
положения пункта Р1 относительно пунктов опорной сети из двух треугольников
составила 0,32 м, и не превышает допустимой величины (0,8 м).
2.2.1.2 Решение прямой геодезической засечки по
формулам тангенсов дирекционных углов
1. Для решения использовались исходные и измеренные данные с плана
участка карьера приведённые на рис. 1.
Таблица №6
|
Известные исходные данные
|
Наименование
|
Х
|
Y
|
|
I
|
25
|
55
|
|
II
|
225
|
115
|
|
III
|
235
|
295
|
|
IV
|
205
|
465
|
. На местности был заложен пункт съёмочной сети Р и измерены
необходимые углы.
|
Измеренные исходные данные
|
r1
|
78.43
|
|
r2
|
57.43
|
|
r3
|
52.45
|
|
r4
|
89.69
|
. По известным координатам и измеренным углам в треугольнике I-II-Р1 определяются:
ΥÐ - ΥÐÐ
tgαÐÐ-Ð=
---------------- tgαÐÐ-Ð = 0,3000 αÐÐ
- Ð = 196,70
ХÐ - ХÐÐ
αÐÐ-Р = αÐÐ
- Ð - r2 αÐÐ-Р = 141,810
αÐ-Р = αÐÐ-Ð + r1- 1800 αÐ-Р = 87,230
γ1 = 1800 - r2 - r1 γ1=54,580 или
γ1 = α Р-ÐÐ - α Р-Ð = 310,4 - 258 = 52,40 γ1=54,580
ХÐÐ ª tgαÐÐ-Р - ХÐ ª
tgαÐ-Р + ΥÐ
- ΥÐÐ
ХР1 = ----------------------------------------------
tgαÐÐ-Р - tgαÐ-Р1
225×(-0,7866)-25×20,6683+60-120
ХР = ---------------------------------------------- = 41,518 м
0,8273+28,64
ΥР = ΥÐÐ
+ (ХР - ХÐÐ)
ª tgαÐÐ-Р
ΥР1 = 115+(39,218-2255)×
(-0,7866) = 271,069 м
. Контроль:
ХÐ ª tgαÐ-ÐÐ - ХР × tgαР-ÐÐ+ ΥР - ΥÐ
ХÐÐ
= -------------------------------------------
tgαÐ-ÐÐ - tgαР-ÐÐ
25×0,3-39,218×(-0,7866)+
265,069-60
ХÐÐ
= ---------------------------------------- = 225 м
0,3 + 0,8273
ΥÐÐ = ΥÐ + (XÐÐ
- ХÐ)ª
tgα tgαÐ -ÐÐ
ΥÐÐ =
55+(225-25)ª0,3 = 60 + 57 = 115 м
. Аналогичное решение выполняется и по треугольнику II-III-Р
Υ ÐÐÐ-ÐÐ -
ΥÐÐ
tgα ÐÐÐ-ÐÐ
= ---------------- tgαÐÐÐ-ÐÐ = 18 α
ÐÐÐ-ÐÐ = 266049'
Х ÐÐÐ - Х ÐÐ
α ÐÐÐ -Р = α
ÐÐÐ - ÐÐ - r4 α ÐÐÐ -Р = 188,5370
α ÐÐ -Р = α
ÐÐÐ-ÐÐ + r3 - 1800 α ÐÐ -Р = 141,6870
γ2 = 1800 - r4 + r3 γ2 = 46,8500 или
γ2 = α Р- ÐÐÐ - α Р- ÐÐÐ = 185,89 +180 - (140,41 + 180) =
46,8500
tgα ÐÐÐ -Р = tg185,890 = tg5,890 890 = 0,103
Х ÐÐÐ ª tgα
ÐÐÐ -Р - Х ÐЪ
tgα ÐÐ -Р +
Υ ÐÐ- Υ ÐÐÐ
ХР1 = -------------------------------------------------
tgα ÐÐÐ -Р - tgα ÐÐ -Р
235×0,1501-225×(-0,7901)
+115-295
ХР1 = --------------------------------------- = 41,584 м
0,103-(-0,8271)
ΥР = Υ
ÐÐÐ + (ХР -
Х ÐÐÐ
) ª tgα ÐÐÐ -Р
ΥР = 295+(41.584-235)×0,1501
= 271,067 м
. Контроль:
Х ÐÐ ªtgα ÐÐ
-ÐÐÐ - ХР ×
tgα Р- ÐÐÐ + ΥР - Υ
ÐÐ
Х ÐÐÐ
= ---------------------------------------------------
tgαÐÐ
-ÐÐÐ -
tgαР-ÐÐÐ
225×17,9990-41,584×0,1501+271,067-120
ХÐÐÐ
= ------------------------------------------ = 235 м
17,98-0,103
ΥÐÐÐ = ΥÐÐ + (ХÐÐÐ - Х-ÐÐ)
ª tgαÐÐ-ÐÐÐ
ΥÐÐÐ =
120+(240-230)×17,9990 = 295 м
. Из решения двух треугольников прямой геодезической засечки по формулам
тангенсов дирекционных углов разница в координатах точки Р составляет ∆ХР
= 0,06 м., ∆YР = 0,002 которая
не превышает 0,6 мм. на плане в масштабе съёмки (для масштаба 1:2000 ∆Х, ∆YР1≤ 1,2 м.)
. Средние значения координат пункта Р1, полученные из решения двух
треугольников:
ХР = 41,551 м. YР1 = 271,068 м.
2.2.2 Обратная геодезическая засечка
Обратная геодезическая засечка - способ определения координат пункта
съёмочного обоснования ХР1; YР1 по трём исходным пунктам (задача Потенота).
Обратная засечка значительно сокращает объём полевых работ по сравнению с
прямой, т.к. измерение углов проводятся непосредственно в определяемом пункте
Р2 на исходные I, II, III, III.
рис.2 (координаты пунктов приведены в таблице №6).
Таблица №7
|
Измеренные величины
|
Варианты (1, 2, 3, 4)
Номера исходных пунктов в варианте
|
|
1
|
2
|
3
|
4
|
|
I- II - III
|
II - III - IV
|
I - II - IV
|
I - III - IV
|
|
Расстояние от Р1 до
исходных
|
lР-I
= 219.30 lР2-II = 250,21 lР2-III = 203.95
|
lР2-II
= 250,21 lР2-III = 203.95 lР2-IV = 250
|
lР2-I
= 219.30 lР2-II = 250,21 lР2-IV = 257.22
|
lР2-I
= 219.30 lР2-III = 203.95 lР2-IV = 257.71
|
|
Расстояние между исходными,
м.
|
LI-II = 208,81 LII-III
= 181.41
|
LII-III = 181,41 LIII-IV = 173,11
|
LI-II = 208,810 LII-IV
= 350,570
|
LI-III = 318,900
LIII-IV = 173,110
|
|
Углы, град
|
φ1
= 71.331º
|
Φ2 = 53.331º
|
φ3
= 71.331º
|
φ4
= 39.2160
|
|
ψ1 = 79.501º
|
Ψ2 = 55.212º
|
ψ3 = 45.3760
|
ψ4 = 52.1130
|
|
φ+ ψ
|
150.8320
|
108.5430
|
116.7070
|
91.3290
|
|
Sin (φ+ ψ)
|
0,476
|
0,947
|
0,946
|
0,997
|
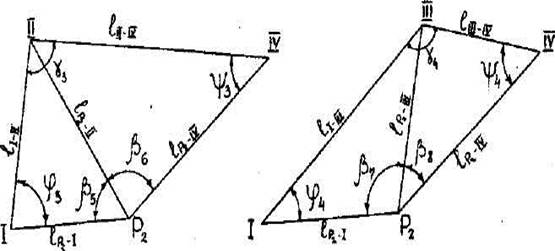
Расчёт обратной геодезической засечки начинается с определения средней
квадратической погрешности положения точки съёмочного обоснования Р1.
относительно пунктов опорной сети I, II, III, III. с
целью выбора наиболее выгодной формы треугольников. Для этого на плане карьера
отмечают предполагаемое положение точки съёмочной сети Р1 и проводят
направления на пункты I, II, III, III. .
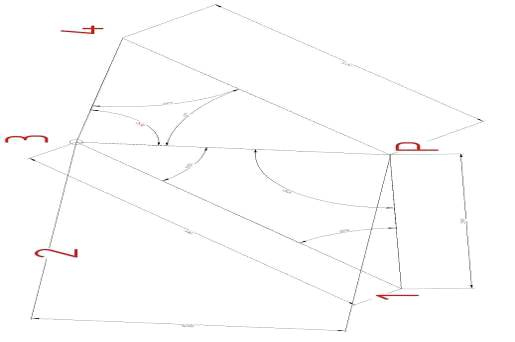
Из возможных вариантов рис.3 предполагаемых треугольников обратных
засечек выбирают те, у которых сумма углов φ + ψ отличается от 00 или 1800 и не менее
300.
Рассмотрев расположение пунктов в карьере, может быть
составлено четыре варианта засечек 1-ый на пункты I, II, III, 2-ой на II, III, IV; 3-ий на I, II,IV; 4-ый на I, III, IV.
рис.2
Варианты решения обратной геодезической засечки
Вариант 1 Вариант 2
Вариант 3 Вариант 4
По каждому варианту засечки, включающему три исходных пункта, вычисляем
среднюю квадратическую погрешность положения определяемого пункта.
Первый вариант (треугольник I, II, III)
mβ
× lР2-II lР2-III lР2-I
МР1 =
------------------------- × -------- + -------- ; МР2 = 0,025
206265 × sin(φ1 + ψ1) lI-II lII-III
Второй вариант (треугольник II, III, IV)
mβ × lР2-III lР2-II lР2-IV
МР1 = ------------------------- × -------- + --------; МР2 = 0,024
206265 ×
sin(φ2 + ψ2) lII-III lIII-IV
Третий вариант (треугольник I, II,IV)
mβ
× lР2-II lР2-I lР2-IV
МР1 =
------------------------- × -------- + -------- ; МР2 = 0,023
206265 × sin(φ3 + ψ3) lI-II lII-IV
Четвёртый вариант (треугольник I, III, IV)
mβ
× lР2-III lР2-I lР2-IV
МР1 =
------------------------- × -------- + -------- ; МР2 = 0,022
206265 × sin(φ4 + ψ4) lI-III lIII-IV
По результатам оценки вариантов засечки имеем, что
наиболее выгодная форма треугольников в вариантах 3 и 4. МР2 имеет наименьшее
значение и не превышает величины 0,3 мм на плане в масштабе съемки (МР2
допустимая составляет 0,6 м). Расчет координат точки съемочного обоснования
проводим по треугольникам вариантов 3 и 4.
Вариант 3
Исходные данные:
ХI = 25 м; YI = 55 м; β5 =52,379°
ХII =
225 м; YII = 115 м; β6 =87,485°
ХIV =
205 м; YIV = 465 м;
β5и β6 определяем с плана участка карьера в
точке Р2 (на практике они измеряются с точностью β≤15»). Для исключения грубых
ошибок при измерении углов на плане измеряются все углы в треугольнике и сумма
их уравнивается к 1800 .
Решая обратную геодезическую задачу, находим:
|
αÐÐ-Ð= arctg
|
YÐ-YÐÐ
|
= arctg
|
60-120
|
=196,70
|
|
XÐ-XÐÐ
|
|
30-230
|
|
|
αÐÐ-Ðv= arctg
|
YÐv-YÐÐ
|
= arctg
|
470-120
|
= 93,270
|
|
XÐv-XÐÐ
|
|
210-230
|
|
|
lÐÐ-Ð= а =
|
30-230
|
= 208,768м
|
|
|
cos αÐÐ-Ð
|
|
|
|
|
|
|
|
|
|
|
|
|
lÐÐ-Ðv= b =
|
470-120
|
= 350,561м
|
|
cos
αÐÐ-Ðv
|
|
По разности дирекционных углов определяем:
γ3= αÐÐ-Ð
- αÐÐ-Ðv
=103,43º
|
ε1= 1800-
|
β5 + β6 + γ3
|
= 1800 -
|
52.378+87,485+103,43
|
=
58,353º
|
|
2
|
|
2
|
|
|
η= arctg
|
а · sinβ6
|
= arctg
|
208,8 · sin
87,485
|
=
36,870º
|
|
b · sinβ5
|
|
351,140 · sin
52,378
|
|
ε2= arctg (tg ε1·ctg(45º+ η))= arctg (tg
58.3530 ·ctg(45º+
36,39º))= 13,580
φ3=
ε1+ ε2 = 58,890+12,080= 71,4030
ψ3=
ε1- ε2=58,890-14,080=45,3030
|
lР2-ÐÐ=d= a
|
sinφ3
|
= 208,810
|
0,948
|
= 249,850
|
|
sinβ5
|
|
0,796
|
|
|
lР2-ÐÐ=d= b
|
sin ψ3
|
= 350,596
|
0,719
|
= 249,844
|
|
sinβ6
|
|
0,996
|
|
d=249,850м
d=249,844м. dср=249,847м
αР2-ÐÐ=
αÐÐ-Ðv
-ψ3 -β6 +2·180=
93,2680-45,3760-87.485°+2·180=320,480
αР2-ÐÐ=
αÐÐ-Ð
+φ3 +β5 -2·180=
196,7000+71,3310+52.3792·180=320,480
αср=320,480
ХР2= ХÐÐ+d·cosαÐÐ-Р2= 225+250,874·cos320.48=32,267м.
YР2=YÐÐ+d·sinαÐÐ-Р2=115+250,874·sin320,48=273,990 м.
Итого вариант III: ХР2 =32,267
м. YР2 = 273,990м.
Схема 3
Масштаб 1:2000

Вариант 4.
Исходные данные:
ХI =
25м YI =55м β7 =97,845°
ХIII = 235м YIII = 295м β8 =42,020°
ХIV =
205м YIV= 465м
Решая обратную геодезическую задачу, находим:
|
αÐÐÐ-Ð= arctg
|
YÐ-YÐÐÐ
|
= arctg
|
55-295
|
=228,8160
|
|
XÐ-XÐÐÐ
|
|
25-235
|
|
|
αÐÐÐ-Ðv= arctg
|
YÐv-YÐÐÐ
|
= arctg
|
465-295
|
=100,0060
|
|
XÐv-XÐÐÐ
|
|
205-235
|
|
|
lÐÐÐ-Ð= а =
|
25-235
|
= 318,917 м
|
|
|
cos
α ÐÐÐ-Ð
|
|
|
|
|
|
|
|
|
|
|
|
|
lÐÐÐ-Ðv= b =
|
205-235
|
= 172,661 м
|
|
cos
α ÐÐÐ -Ðv
|
|
По разности дирекционных углов определяем:
γ4= αÐÐÐ-Ð
- αÐÐÐ-Ðv = 128,810
|
ε1= 1800-
|
β7 + β8 + γ4
|
= 180 -
|
97,845º+42,02º+128,81º
|
=45,6630
|
|
2
|
|
2
|
|
|
η=
arctg
|
а · sinβ8
|
= arctg
|
318,917
· sin 42,020º
|
= 51,2950
|
|
|
b · sinβ7
|
|
172,661
· sin 97,845º
|
|
|
|
|
|
|
|
|
|
|
|
|
ε2= arctg (tg ε1·ctg(45º+
η))= arctg (tg45,663×ctg(45º+ 51,295))=-6,500
φ4=
ε1+ ε2 =39,1630
ψ4=
ε1- ε2=52,1630
|
lР2-ÐÐÐ=d= a
|
sinφ4
|
= 318,917×
|
0,6315
|
= 203,307
|
|
sinβ7
|
|
0,9906
|
|
|
lР2-ÐÐÐ=d= b
|
sinψ4
|
= 172,661×
|
0,7898
|
= 203,706
|
|
sinβ8
|
|
0,6694
|
|
d=203,307м;
d=203,706м; dср=203,506м.
αР2-ÐÐÐ=
αÐÐÐ-Ðv
-ψ4 -β8 +2·180=
100,006-52,163-442,020+2·180=365,8230
αР2-ÐÐÐ=
αÐÐÐ-Ð
+φ4 +β7 -2·180=
228,816+39,163+97,845-2·180=365,8240
αср=365,82350
ХР2= ХÐÐÐ+d·cosαÐÐÐ-Р2= 235+203,506·cos365,8235 = 32,544м.
YР2=YÐÐÐ+d·sinαÐÐÐ-Р2=295+203,506·sin365,8235 = 274,351 м.
По результатам расчета координат точки Р2 из двух
вариантов засечки имеем:
Вариант3 ХР2 =32,267 м. YР2 =
273,990м.
Вариант4 ХР2= 32,544м. YР2 = 274,351 м.
Сравнивая два варианта решения, получаем разницу в
координатах ∆ХР2 =32,544-32,267 = 0,277 м;
∆YР2 =
274,351 - 273,990 = 0,361 м
что не превышает величины 0,4 мм на плане в масштабе
съемки (0,8 м)
Принимаем среднее значение координат точки Р2,
полученных из двух вариантов засечки
ХР2=32,406 YР2=274,170 м;
Схема 4
Масштаб 1:2000
2.2.3 Азимутальная засечка
Исходные данные:
I Х=25м У=55мХ=225м У=115м Х-=235 У =295
В У = -58.104 м Х = -56.968 м
B1=13,107º
B2=65,485º
B1=110,951º
Ар-1=268,03º
Ар-2=320,408º
Ар-3=5,874º
По разности углов вычисляем:
γ1 = α А -Р1 - α А-В = 83,030 - 16,699 = 71,331º
γ2 = α В - А - α В-Р =196,7 - 140,409 = 56,291º
γ3 = α В - Р1 - α В-с = 140,409º
- 86.82 = 53,589º
γ4 = α С-В - α С-Р1 = 266,819 - 185,874 = 80,945º
Получаем: γ1 =71,331˚;
γ2 =56,291˚;
γ3 =53,589˚;
γ4 =80,945˚;
Решая по полученным результатам прямую засечку
получаем координаты Х и Y
точки Р
225ctg(71,331)
+25ctg(56,291)+55-115
Хр=
-------------------------------------------------------------- =32,539
ctg(56,291) +ctg(71,33)
115ctg(71,331)
+55ctg(56,291)-25+225
Ур=
-------------------------------------------------------------- =274,173
ctg(56,291)
+ctg(71,33)
Ответ:Хр=32,539 Ур= 274,173
съёмочный теодолитный маркшейдерский геодезический
Схема Азимутальная засечка Масштаб 1:2000

2.2.4 Линейная геодезическая засечка
Линейная засечка - способ определения координат съемочного обоснования по
известным координатам двух пунктов опорных сетей (исходные пункты) и измеренным
расстояниям от исходных пунктов до определяемого. Наиболее известны два способа
решения линейной засечки:
первый - по углам в исходных точках, решают линейный треугольник (рис.4),
определяя углы β1 и β2
|
cos
βı=
|
p
- a²
|
;
|
cos
β2=
|
p
- b²
|
|
b c
|
|
|
a c
|
и затем вычисляют координаты пункта P1, решая прямую засечку, где a и b -
измеренные, c - данная сторона треугольника; p - полусумма квадратов длин сторон
второй - по проекции сторон, координаты пункта P1 вычисляют исходя от пунктов опорных сетей:
от пункта I
XP1=XI + fPI cosαI-II - hPI sinαI-II ;
YP1=YI + fPI
sinαI-II + hPI cosαI-II ;
от пункта II
= XII - qPI cosαI-II -
hPI sinαI-II ;
YP1 = YII - qPI sinαI-II +
hPI cosαI-II ;
где fPI и qPI - проекции двух сторон треугольника на третью сторону
|
qPI =
|
a²
+ c² - b²
|
= c - fPI
|
|
2c
|
|
- высота треугольника
hPI = b² - fPI² = a²
- qPI² ;
α - дирекционный угол исходной стороны
|
sinαI-II
=
|
YII - YI
|
; cosαI-II =
|
XII - XI
|
|
C
|
|
c
|
Высота треугольника hPI
принимается с соответствующим знаком: плюс, если точка PI расположена справа по отношению к линии I-II и минус, если слева.
Линейная засечка схема масштаб 1:2000

2.2.4.1 Решение линейной засечки по проекциям
сторон
Таблица 8
|
Х
|
Y
|
αизм.
|
185,571
|
|
Пункт I
|
25
|
55
|
bизм.
|
191,093
|
|
Пункт II
|
225
|
115
|
свыч
|
208,806
|
Решение: Вычисляем координаты пункта Р1 исходя из пунктов сети по
проекциям сторон.
b2 + с2 - α2
fР1 = ---------------
2с
|
fР1=
|
185,5712 +208,8062 -
191,0932
|
= 99,422 м.
|
|
2·208,806
|
|
α2 + с2 - b2Р1 = --------------- или
qР1 = с - fР1
2с
|
qР1=
|
191,0932+208,8062 -
185,5712
|
= 109,384 м.
|
|
2·208,806
|
|
или qР1 = 208,806-99,422 = 109,384м.
Р1 = √ b2 - f2Р1 hР1 = √ 185,5712
-99,4222 = 156,690 м.Р1 = √ α2 - q2Р1 hР1 = √
191,0932- 109,3842 = 156,690 м.
Υll - Υl Хll - Хl
sinα2-56 = -------------- сosα2-56 =
---------------
С
С
|
sinαÐ-ÐÐ=
|
120-60
|
=0,2874 cosαÐ-ÐÐ =
|
230-30
|
=0,9578
|
|
208,807
|
|
208,807
|
|
Исходя из пункта I:
ХР1 = Хl + fР1 × сosαI-II - hР1 × SinαI-II
ХР1 = 30 + 70,614×0,9578-196,71×0,2874 =41.099м.
ΥР1 = Υl + fР1 ×
SinαI-II + hР1 ×сosαI-II
ΥР1 = 60 + 70,614×
0,2874 + 196,71 × 0,9578 = 268.703 м.
Исходя из пункта II:
ХР1 = Хl + qР1 × сosαI-II - hР1 ×SinαI-II
ΥР1 = ΥI + qР1 ×
SinαI-II + hР1 ×сosαI-II;
ΥР1 = 55 - 99,422×0,2873 + 156,690
× 0,9578 =233,651
м.
Контроль:
Исходя от пункта I
ΔХÐ-Р1 = b · cosαÐ-P1
ΔYÐ-Р1 = b · sinαÐ-P1
B выч = √ ΔХÐ-Р12 + ΔYÐ-Р12
Исходя от пункта II
ΔХÐÐ-Р1 = b · cosαÐÐ-P1
ΔYÐÐ-Р1 = b · sinαÐÐ-P1
а = √ ΔХÐ-Р12 + ΔYÐ-Р12
|
cosαÐ-Р1=
|
YР1-YÐ
|
; sinαÐ-Р1 =
|
XР1-XÐ
|
|
b
|
|
B
|
|
cosαÐÐ-Р1=
|
YР1-YÐÐ
|
; sinαÐÐ-Р1 =
|
XР1-XÐÐ
|
|
а
|
|
А
|
|
|
|
|
|
|
|
B выч -b1 =Δb; авыч - а1 =Δа
Δb и Δа - погрешности определение координат
точки Р1 относительно пунктов опорной сети.
Решение:
|
cosαÐ-Р1=
|
233,651 - 55
|
=0,96271 sinαÐ-Р1
=
|
75.204-25
|
=0,27054
|
|
185,571
|
|
185,571
|
|
|
cosαÐÐ-Р1=
|
233,651-115
|
=0,62091 sinαÐÐ-Р1 =
|
75,204 -225
|
= - 0,783389
|
|
191,093
|
|
191,093
|
|
Исходя из этого
в = 185,571 м.
а = 191,094 м.
в- в(выч)= Δ0,000 а- а(выч)= Δ0,001
Исходя этого
Решение по прямой засечки Х р=75,695 Yр=233,763
По результатам расчетов ошибка определения точки Р1
относительно опорных сетей составила 0 мм при допустимой 0,4 мм на плане в
масштабе съемки (0,8 м). Для дополнительного контроля сравниваем значения
координат точки Р1 полученных из решений линейной засечки.
ΔХ = 75.812-75.204=0.608 м. ΔY = 233.707-233.651=0112 м.
Полученная разница в результатах не превышает
допустимого расхождения 0,6 мм. на плане в масштабе съемки (1,2 м. для масштаба
1:2000).
Принимаем среднее значение координат точки Р1
ΔХ = 75.508 м. ΔY = 233.707 м.
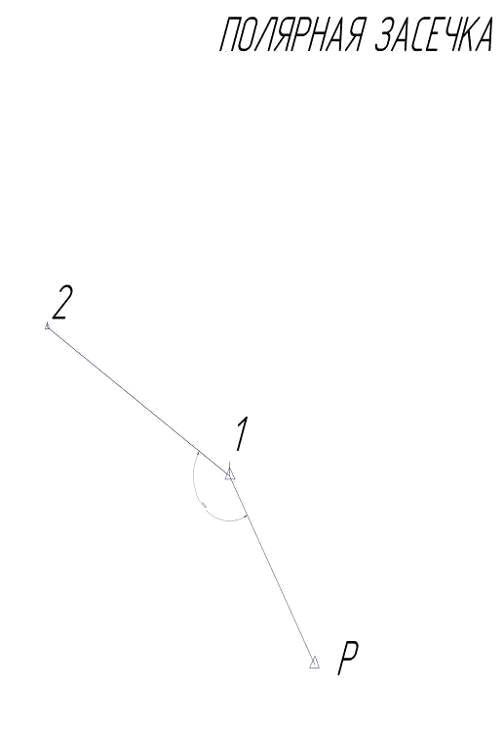
2.3 Вариант создания съемочного обоснования на карьерах полярной
засечкой
Полярный способ определения координат пункта
съемочного обоснования по измеренным горизонтальным углам (β1
β2), вертикальному
углу δ1
и расстоянию l1 от
исходного опорного пункта I до
определяемого Pi (рис.5). Способ достаточно
эффективен на карьерах со значительным удалением участков ведения горных работ
от пунктов опорных сетей

Для производства работ на нерабочих бортах карьера
закладывается необходимое количество опорных пунктов, обеспечивающих видимость
на все рабочие участки карьера.
Рис.6 Полярная засечка, полярный способ определения
координат
Горизонтальные и вертикальные углы измеряются
теодолитами класса T1, Т2, наклонные
расстояния светодальномерами, соблюдая следующие требования [I]: расстояние до определяемого пункта
не должно превышать 3 км, средняя квадратическая погрешность измеренного
расстояния не более 0,1 м, горизонтальные углы измеряются круговыми приемами не
менее чем от двух исходных направлений с расхождением в дирекционных углах от
каждого направления на определяемый пункт не более 45".
Необходимо стремиться, чтобы длины исходных направлений превышали длины
направлений до определяемых пунктов съемочного обоснования.
Координаты определяемого пункта вычисляют по формулам:
XР1 = X1 + d1cosα1-Р1; YР1 = Y1 + d1sinα1-Р1,
где: d1 = ctgδ1; α1-Р1 = αÐÐ-Ð
+ β1 - 180º = αÐÐÐ-Ð + β2 - 180º
Погрешность положения определяемого пункта вычисляют
по формуле
|
МPI= (
|
m0 * l
|
)²
+ ml²
|
|
ρ״
|
|
ãде: та - погрешность определения
дирекционного угла из двух направлений, тl, - погрешность измерения расстояния.
Решение
Исходные данные
Точка 1 х=431,198 у=3008,715
Точка 2 х=606,458 у=2740,551
XР1 = X1 + d1cosα1-Р1; YР1 = Y1 + d1sinα1-Р1,
d=127,680
XР1 = 431 + 127,680cos150,516º1-Р1=431,198 YР1 = 3008 +127,680sin127,6801-Р1=3008,715
Ответ :XР1 =
431,198 м YР1= 3008,715 м
Схема масштаб 1:2000
2.4 Аналитическая
фототриангуляция
Как способ создания съемочного обоснования
используется в случаях применения фотограмметрической съемки на карьере.
Координаты и высоты пунктов съемочной сети вычисляются на ЭВМ по специальным
программам, предусматривающим уравнивание и оценку точности положения пунктов.
Погрешности координат определяемых пунктов не должны превышать основных
требований, предъявляемых к съемочным сетям [I]. Масштаб снимков, высоту фотографирования, местоположение и
количество опорных пунктов на снимке определяют также с учетом выполнения
основных требований по точности определения пунктов съемочного обоснования.
Методика выполнения полевых работ и вычислений данного способа изучается в
курсе фотограмметрии.
При применении на карьере наземной
стереофотограмметрической съемки положение съемочных пунктов может быть
определено графомеханическим способом - решением фотограмметрической прямой
засечки непосредственно на плане. Для этого используют стереопары фотоснимков,
снятые с двух или трех базисов фотографирования. Базисы (рис.6) Б1 Б2, Б3
выбираются таким образом, чтобы соответствующие направления от левых концов
каждого из них (Н1, Н2, Н3) на определяемые пункты пересекались под углом от 30
до 120°
В качестве определяемых пунктов P1, P2, Р3 могут быть использованы любые неподвижные, хорошо
видимые на снимках предметы или специально или специально установленные в
нужных местах сигналы.
На стереоавтограф устанавливают поочередно стереопару
каждого базиса. Каждую из них ориентируют обычным порядком, вводят базис
фотографирования, устанавливают высотную отметку станции (левого конца базиса)
и ориентируют планшет. Ориентирование планшета может проводиться по 2-3 точкам,
одной удаленной точке с известными координатами, известному направлению или
дирекционному углу нормальной оптической оси фотокамеры.

Рис.7 Схема прямой фотограмметрической засечки
Затем с каждого базиса, наводя марку бинокуляра
стереоавтографа на определяемые пункты (сигналы), на планшете карандашом
координатографа прочерчивают направления на соответствующие пункты, записывают
их высотные отметки, снятые со счетчика высот прибора. Точки пересечения,
полученные по соответствующим направлениям из двух или трех базисов на плане,
определяют их координаты и высотные отметки.
2.5 Îïðåäåëåíèå
âûñîòíûõ îòìåòîê
ïóíêòîâ ñúåìî÷íîãî
îáîñíîâàíèÿ
Âûñîòíîå
îáîñíîâàíèå
ìàðêøåéäåðñêèõ
ñúåìîê â êàðüåðå
ñîçäàåòñÿ îäíîâðåìåííî
ñ ïëàíîâûì. Èñõîäíûìè
ïóíêòàìè ïî îïðåäåëåíèþ
âûñîòíûõ îòìåòîê
ïóíêòîâ ñúåìî÷íîãî
îáîñíîâàíèÿ
ÿâëÿþòñÿ ïóíêòû
îïîðíûõ âûñîòíûõ
ñå÷åé 3-ãî - 4-ãî êëàññîâ.
Âûñîòíûå
îòìåòêè ïóíêòîâ
ñúåìî÷íîãî îáîñíîâàíèÿ
â êàðüåðå îïðåäåëÿþòñÿ
ãåîìåòðè÷åñêèì
íèâåëèðîâàíèåì
4-ãî êëàññà, òåõíè÷åñêèì
íèâåëèðîâàíèåì
èëè òðèãîíîìåòðè÷åñêèì.
Äëÿ òåõíè÷åñêîãî
íèâåëèðîâàíèÿ
ïðèìåíÿþòñÿ íèâåëèðû
êëàññà òî÷íîñòè
Í10 è âûøå. Íèâåëèðíûå
õîäû ïðîêëàäûâàþòñÿ
ìåæäó èñõîäíûìè
ïóïêàìè â îäíîì
íàïðàâëåíèè,
âèñÿ÷èå õîäû
îò èñõîäíîãî
ïóíêòà â ïðÿìîì
è îáðàòíîì íàïðàâëåíèÿõ.
Ðàññòîÿíèÿ äî
ðååê íà ñâÿçóþùèõ
òî÷êàõ ïî âîçìîæíîñòè
äîëæíû áûòü ðàâíûìè
è íå ïðåâûøàòü
150 ì. Äîïóñòèìàÿ
ðàçíîñòü â ïðåâûøåíèÿõ,
îïðåäåëåííûõ
ïðè äâóõ ãîðèçîíòàõ
èíñòðóìåíòà
èëè ïî ÷åðíîé
è êðàñíîé ñòîðîíàì
ðåéêè, 5 ìì. Ïðåäåëüíàÿ
âûñîòíàÿ íåâÿçêà
õîäà, f ≤ 5O√7. , ìì èëè
10 √n, ìì ïðè
÷èñëå ñòàíöèè
áîëåå 25 íà 1 êì õîäà,
ãäå L, - äëèíà
õîäà â êì. ï - ÷èñëî
ñòàíöèé â õîäå
[ 1 ].
Ïðîèâîäñòâî
òðèãîíîìåòðè÷åñêîãî
íèâåëèðîâàíèÿ
âêëþ÷àåò èçìåðåíèå
âåðòèêàëüíîãî
óãëà d, íàêëîííîãî
ðàññòîÿíèÿ i, âûñîòû
èíñòðóìåíòà
i, âûñîòû
ñèãíàëà v (ðèñ.7)
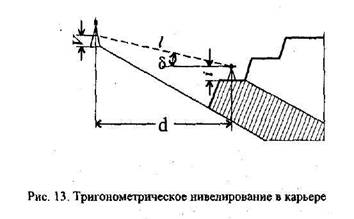
Ðèñ. 8 Òðèãîíîìåòðè÷åñêîå
íèâåëèðîâàíèå
â êàðüåðå
Ïðåâûøåíèå îïðåäåëÿåòñÿ
ïî ôîðìóëå:
ΔZ=dtgδ + f + i - v = lsinδ + f + i- v
ãäå: d- ãîðèçîíòàëüíîå,
l - íàêëîííîå ðàññòîÿíèÿ
ìåæäó ïóíêòàìè,
ì.
f= k + r,
|
ãäå
|
k=
|
d2
|
- ïîïðàâêà
çà êðèâèçíó Çåìëè
|
|
|
2R
|
|
|
r = -k
|
d2
|
- ïîïðàâêà
çà ðåôðàêöèþ
|
|
2R
|
|
R = 6370 êì - ñðåäíèé
ðàäèóñ Çåìëè
r - êîýôôèöèåíò
çåìíîé ðåôðàêöèè.
Ïî ðåçóëüòàòîì
èññëåäîâàíèÿ
èçâåñòíî, ÷òî
â òå÷åíèå äíÿ
êîýôôèöèåíò
ðåôðàêöèè èçìåíÿåòñÿ
îò -0,22 ïåðåä âîñõîäîì
è äî -0,10 ïåðåä çàõîäîì
Ñîëíöà. Äëÿ ñðàâíèòåëüíî
êîðîòêèõ ðàññòîÿíèé
(äî 3 êì) ñðåäíåå
çíà÷åíèå åãî
ïðèíÿòî ñ÷èòàòü
ðàâíûì kñð= -0,16. Òîãäà
ñóììàðíàÿ ïîïðàâêà
çà êðèâèçíó Çåìëè
è ðåôðàêöèþ áóäåò
|
f = k + r =
|
d2
|
-0,16
|
d2
|
= 0,42
|
d2
|
|
2R
|
|
2R
|
|
R
|
Âåðòèêàëüíûå
óãëû èçìåðÿþòñÿ
òåîäîëèòîì êëàññà
òî÷íîñòè Ò30 äâóìÿ
ïðèåìàìè, T15 è âûøå
- îäíèì ïðèåìîì.
Âûñîòà èíñòðóìåíòà
è ñèãíàëà îïðåäåëÿþòñÿ
ðóëåòêîé ñ îêðóãëåíèåì
äî ñàíòèìåòðîâ.
Õîäû òðèãîíîìåòðè÷åñêîãî
íèâåëèðîâàíèÿ
îïèðàþòñÿ íà
ïóíêòû îïîðíûõ
ñåòåé íå íèæå
4-ãî êëàññà îáùåé
ïðîòÿæåííîñòüþ
íå áîëåå 2,5 êì.
Ïðåâûøåíèå
äëÿ êàæäîé ñòîðîíû
îïðåäåëÿåòñÿ
äâàæäû â ïðÿìîì
è îáðàòíîì íàïðàâëåíèÿõ.
Äîïóñòèìîå ðàñõîæäåíèå
â ïðåâûøåíèÿõ
0,04l, ñì, âñåãî
õîäà 0,004 L /√n , ãäå l- íàêëîííàÿ
äëèíà ñòîðîíû,
ì; L - äëèíà
õîäà, ì, ï - ÷èñëî
ñòîðîí.
Ðåøåíèå
d=127,679 ì
l=127,723 ì
âåðòèêàëüíûé
óãîë b=1,52º
âûñîòà ïðèáîð
1,6 ì
âûñîòà îòðàæàòåëÿ
2 ì.
Ðåøåíèå
127,679
ΔZ=127,679tg1,52º+0.42--------- +1,6-2=1,989 ì
6370000
Îòâåò: ΔZ=1,989
3. Ìàðêøåéäåðñêèå
ðàáîòû ïðè ïðîõîäêå
òðàíøåé
Ïðîõîäêà òðàíøåè
â êàðüåðå ïðåäíàçíà÷åíà
äëÿ âñêðûòèÿ êàðüåðíîãî
ïîëÿ ñ öåëüþ îáåñïå÷åíèÿ
äîñòóïà îò ïîâåðõíîñòè
çåìëè èëè êàêîé-ëèáî
ðàçðàáàòûâàåìîé
÷àñòè êàðüåðà
ê âíîâü ñîçäàâàåìûì
ðàáî÷èì ãîðèçîíòàì.
Íåïîñðåäñòâåííîé
çàäà÷åé ïðè ïðîõîäêå
òðàíøåè ÿâëÿåòñÿ
óñòàíîâëåíèå
ãðóçîòðàíñïîðòíîé
ñâÿçè ìåæäó ãîðèçîíòàìè
è ïóíêòàìè ïðè¸ìà
ãîðíîé ìàññû
íà ïîâåðõíîñòè
èëè â êàðüåðå. Ïàðàìåòðû
òðàíøåè ðàññ÷èòûâàþòñÿ
â çàâèñèìîñòè
îò âèäà êàðüåðíîãî
äîáû÷íîãî îáîðóäîâàíèÿ,
òðàíñïîðòà è
èíæåíåðíî-ãåîëîãè÷åñêèõ
óñëîâèé.
Íà ïðîõîäêó òðàíøåè
ñîñòàâëÿþò òåõíè÷åñêèé
ïðîåêò, ê êîòîðîìó
ïðèëàãàþòñÿ:
· ãåíåðàëüíûé
ïëàí êàðüåðà; ïëàí
òðàíøåè ñ óêàçàíèåì
÷èñëîâûõ çíà÷åíèé
êîîðäèíàò óñòüÿ
òðàíøåé;
· ïîëîæåíèå
îñè, óãëû ïîâîðîòà,
ðàäèóñû êðèâûõ;
· âûñîòíûå îòìåòêè
äíà òðàíøåè.
Ìàðêøåéäåðñêèå
ðàáîòû ïðè ïðîõîäêå
òðàíøåè çàêëþ÷àþòñÿ
â ñëåäóþùåì:
· îáåñïå÷åíèå
ðàéîíà ïðîõîäêè
òðàíøåè ïóíêòàìè
ñú¸ìî÷íîãî îáîñíîâàíèÿ;
· ðàçðàáîòêà
ïðîåêòà òðàññû
òðàíøåè;
· ðàñ÷¸ò ðàçáèâî÷íûõ
ýëåìåíòîâ äëÿ
âûíîñà â íàòóðó
ïàðàìåòðîâ òðàíøåè;
· ïåðåíåñåíèå
â íàòóðó îñíîâíûõ
ýëåìåíòîâ òðàíøåè:
óñòüÿ, îñè, óãëîâ
ïîâîðîòà;
· ñèñòåìàòè÷åñêîå
íàáëþäåíèå çà
ïðîõîäêîé òðàíøåè,
êîíòðîëü å¸ íàïðàâëåíèÿ
è óêëîíà (ñúåìêà
ôàêòè÷åñêèõ
ïàðàìåòðîâ);
· ïîäñ÷¸ò îáú¸ìîâ
âûíóòîé ãîðíîé
ìàññû.
 êóðñîâîé ðàáîòå
ðàçðàáîòàí ïðîåêò
òðàññû âûåçäíîé
òðàíøåè.
Ïðîåêò òðàññû
âûåçäíîé òðàíøåè
ïðîèçâîäèëñÿ
íà îñíîâå ñëåäóþùèõ
ìàòåðèàëîâ:
· ïëàí ïîâåðõíîñòè
â ìàñøòàáå ïëàíà
ãîðíûõ ðàáîò
1:1000 ñ óêàçàíèå ðåëüåôà
ìåñòíîñòè;
· ïàðàìåòðû
òðàíøåè - ïðîòÿæ¸ííîñòü
â öåëîì è îòäåëüíûõ
ó÷àñòêîâ, óãîë
îòêîñà áîðòîâ,
øèðèíà äíà, ïðîåêòíûé
óêëîí, óãëû ïîâîðîòà,
ðàäèóñû çàêðóãëåíèé;
· êîîðäèíàòû
ïóíêòîâ îïîðíîãî
èëè ñú¸ìî÷íîãî
îáîñíîâàíèÿ,
äèðåêöèîííûé
óãîë èñõîäíîãî
íàïðàâëåíèÿ.
 ðàìêàõ äàííîãî
êóðñîâîãî ïðîåêòà
òðåáóåòñÿ âûïîëíèòü:
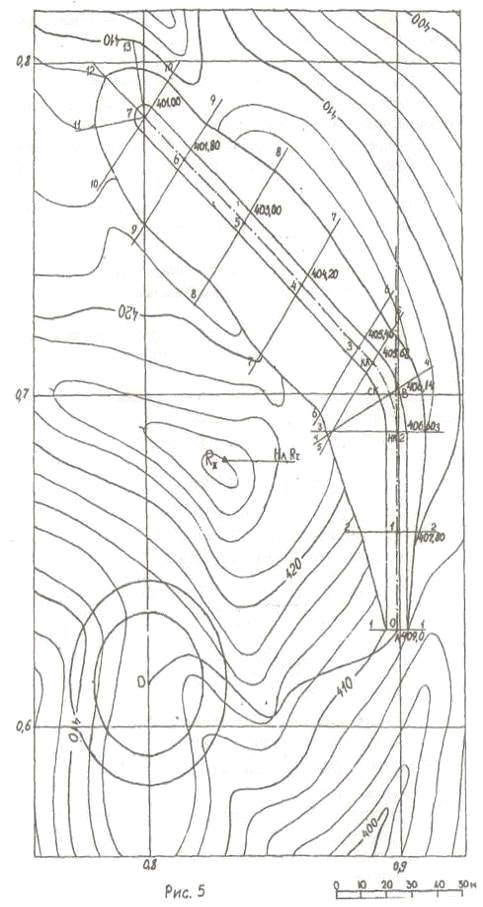
1. Íàíåñòè
íà ïëàí îñü, äíî
è âåðõíèå ãðàíèöû
áîðòîâ òðàíøåè;
. Ïîñòðîèòü
ïðîäîëüíûé ðàçðåç
ïî îñè òðàíøåè,
ãîðèçîíòàëüíûé
ìàñøòàá 1:1000, âåðòèêàëüíûé
1.100;
3. Îïðåäåëèòü
îáùèé îáúåì ãîðíîé
ìàññû ïðè ïðîõîäêå
òðàíøåè (Vîáù)
ìåòîäîì ïîïåðå÷íûõ
ñå÷åíèé â ìàñøòàáå
1:100, ðàññòîÿíèå
ìåæäó ñå÷åíèÿìè
30 ì;
4. Îïðåäåëèòü
îáúåì ïî÷âåííîãî
ñëîÿ (Vï), ïðèíÿâ
êîýôôèöèåíò
ðàçðûõëåíèÿ kð
=1,3;
5.Îïðåäåëèòü âåëè÷èíó
ïëîùàäè, çàíèìàåìîé
ïî÷âåííûì îòâàëîì
è íàíåñòè ãðàíèöó
îòâàëà íà ïëàí
â ðàéîíå ò.D;
6.Íàíåñòè íà ïëàí
òðàññó àâòîìîáèëüíîé
äîðîãè îò óñòüÿ
òðàíøåè (òî÷êà
À) äî öåíòðà îòâàëà
(òî÷êà D), óêëîí
òðàññû iòð=0,064.
Ðàçðàáîòêà ïðîåêòà
òðàññû âûåçäíîé
òðàíøåè.
Èñõîäíûå äàííûå:
Òàáëèöà 9
|
Êîîðäèíàòû
ïóíêòà RII îïîðíîé
ãåîäåçè÷åñêîé
ñåòè
|
ÕRII = 0,70 YRII =
0,840
|
|
Äèðåêöèîííûé
óãîë èñõîäíîãî
íàïðàâëåíèÿ
αRII-RI
|
102000′
|
|
Âûñîòíàÿ
îòìåòêà óñòüÿ
òðàíøåè (òî÷êà
À)
|
409,0ì
|
|
Óãîë
ïîâîðîòà îñè
òðàíøåè (òî÷êà
Â)
|
43000′
|
|
Ðàäèóñ
çàêðóãëåíèÿ
|
25ì
|
|
Äëèíà
òðàíøåè: îò òî÷êè
À äî òî÷êè Â, îò
òî÷êè Â
|
40ì 130ì
|
|
Øèðèíà
äíà òðàíøåè
|
8ì
|
|
Ïðîåêòíûé
óêëîí äíà òðàíøåè
|
i = -0,040
|
|
Óãîë
îòêîñà áîðòà
òðàíøåè
|
β
= 400
|
|
Âûñîòà
îòâàëà
|
2,5 ì.
|
|
Ôîðìà
îòâàëà
|
Óñå÷¸ííûé
êîíóñ ñ ïëîùàäüþ
íèæíåãî îñíîâàíèÿ
â 2 ðàçà áîëüøå
âåðõíåãî
|
Ðàçáèâî÷íûå
ýëåìåíòû äëÿ âûíîñà
â íàòóðó ïàðàìåòðîâ
äíà òðàíøåè
Îò òî÷êè À
|
Ðàñïîëîæåíèå
òî÷åê ðàçáèâêè
|
|
Íîìåð
ïèêåòà
|
Ëåâûé
êðàé òðàíøåè
|
Öåíòð(ñ
öåíòðîì ïèêåòà)
|
ïðàâûé
êðàé òðàíøåè
|
|
¹
|
L ìåòð
|
f ãðàä.ìèí
|
L ìåòð
|
f ãðàä.ìèí
|
L ìåòð
|
f ãðàä.ìèí
|
|
0
|
4
|
323,22
|
0
|
0
|
4
|
142,22
|
|
1
|
30,71
|
52,51
|
30
|
45,15
|
30,71
|
61,4
|
|
2
|
61,9
|
49,15
|
60
|
53,34
|
62,01
|
56,55
|
|
ñê
|
71,74
|
47,49
|
73,33
|
51,1
|
75,09
|
53,46
|
|
êê
|
81,23
|
44,24
|
83,68
|
46,28
|
86,49
|
48,23
|
|
3
|
86,6
|
40,51
|
43,4
|
89,36
|
91,71
|
45,1
|
|
4
|
112,21
|
31,25
|
114,34
|
33,12
|
116,57
|
39,49
|
|
5
|
139,91
|
25,25
|
141,8
|
26,51
|
169,35
|
23,41
|
|
6
|
169,35
|
21,4
|
171,03
|
22,22
|
172,37
|
23,41
|
|
7
|
189,28
|
19
|
190,54
|
20,16
|
194,87
|
21,24
|
|
11-12-13
|
192,43
|
19,2
|
194,46
|
19,52
|
194,06
|
20,52
|
Ðàçðàáîòêà ïðîåêòà
ïðîèçâîäèëàñü
â ñëåäóþùåé ïîñëåäîâàòåëüíîñòè:
. Íà ïëàíå ìàñøòàáà
1:1000 ñòðîèòñÿ ðåëüåô
ïîâåðõíîñòè
è ïî èçâåñòíûì
êîîðäèíàòàì
íàíîñèòñÿ ïóíêò
îïîðíîé ñåòè
RII. Ïî äèðåêöèîííîìó
óãëó ïîêàçûâàåòñÿ
íàïðàâëåíèå íà
ïóíêò RI.
. Îïðåäåëÿåòñÿ
ìåñòî çàëîæåíèÿ
òðàññû òðàíøåè
(òî÷êà À), ñ óêàçàíèåì
íàïðàâëåíèÿ äî
óãëà ïîâîðîòà
(òî÷êà Â).
Äëÿ ïîñòðîåíèÿ
çàêðóãëåíèÿ
îñè òðàíøåè íåîáõîäèìî
ðàññ÷èòàòü òî÷êè
êàñàíèÿ êðèâîé
(ÍÊ è ÊÊ) ïî ôîðìóëå:
Ò = r × tg (α/2),
ãäå Ò - òàíãåíñ
êðèâîé (ðàññòîÿíèå
îò òî÷êè ïîâîðîòà
äî ÍÊ è ÊÊ),- ðàäèóñ
çàêðóãëåíèÿ,
ì
Ò = 25 × tg(43˚/2), Ò
= 9,5966ì
. Îòëîæèâ íà ïðÿìûõ
ó÷àñòêàõ îñè
îò òî÷êè  çíà÷åíèå
Ò, ïðîâîäèòñÿ äóãà
çàäàííîãî ðàäèóñà,
îïðåäåëÿåòñÿ
å¸ äëèíà:
êð = (π × r × α)/180 Lêð
= (3,14 × 25 × 43)/180 = 18,316ì
. Îò òî÷êè  ïîä
óãëîì ïîâîðîòà
íàíîñèòñÿ îñü
íà ðàññòîÿíèå
130ì.
. Ïî èçâåñòíîé
øèðèíå âû÷åð÷èâàþòñÿ
ãðàíèöû äíà òðàíøåè
ïàðàëëåëüíî îñè.
. Îò òî÷êè À ÷åðåç
30ì îòìå÷àþòñÿ
ïèêåòû, ïîäïèñûâàþòñÿ
èõ íîìåðà è âûñîòíûå
îòìåòêè äíà, êîòîðûå
âû÷èñëÿþòñÿ
ïî ôîðìóëå:
äíà = ZÀ + d * i,
ãäå ZÀ
- âûñîòíàÿ îòìåòêà
óñòüÿ òðàíøåè
â òî÷êå À, ì- ðàññòîÿíèå
îò óñòüÿ òðàíøåè
äî ïèêåòà, ì- ïðîåêòíûé
óêëîí òðàíøåè
(-0,040)
. Äëÿ êàæäîãî
ïèêåòà îïðåäåëÿåòñÿ
ãëóáèíà çàëîæåíèÿ
äíà òðàíøåè h ïî
ôîðìóëå:
= ZÀ - Zäíà
Òàáëèöà
10
|
Íîìåð
ïèêåòà
|
Âûñîòíàÿ
îòìåòêà äíà òðàíøåè,
ì
|
Ãëóáèíà
çàëîæåíèÿ äíà
òðàíøåè, ì
|
|
1
|
407,8
|
1,2
|
|
Â
|
407,4
|
1,6
|
|
2
|
406,6
|
2,4
|
|
3
|
405,4
|
3,6
|
|
4
|
404,2
|
4,8
|
|
5
|
403,0
|
6,0
|
|
6
|
402,3
|
6,7
|
. Íà ïëàíå â ïèêåòíûõ
òî÷êàõ ïåðïåíäèêóëÿðíî
îñè òðàíøåè ïðîâîäÿòñÿ
ëèíèè ïîïåðå÷íûõ
ðàçðåçîâ äëÿ ïîñòðîåíèÿ
âåðòèêàëüíûõ
ñå÷åíèé.
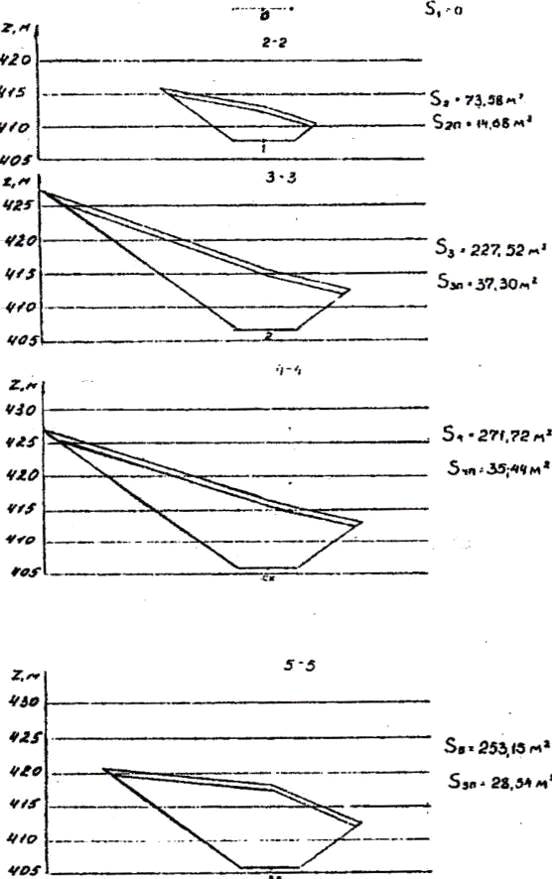
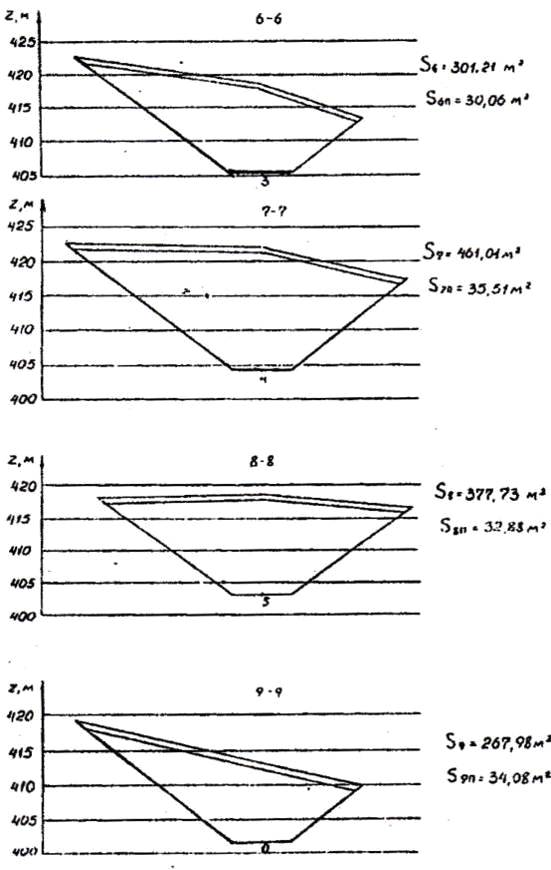
. Ñòðîÿòñÿ âåðòèêàëüíûå
ñå÷åíèÿ.
. Ñòðîèòñÿ ïðîäîëüíûé
ðàçðåç òðàíøåè.
. Ðàññ÷èòûâàåòñÿ
îáú¸ì ãîðíîé
ìàññû ïðè ïðîõîäêå
òðàíøåè.
îáù. = ΣVi, ãäå
. = 0,5 × (Si + Si+1) × L
Si è Si+1 - ïëîùàäè
ñîñåäíèõ âåðòèêàëüíûõ
ñå÷åíèé òðàíøåè,
à L - ðàññòîÿíèå
ìåæäó íèìè.
Âåäîìîñòü ðàñ÷¸òà
îáú¸ìîâ ýëåìåíòîâ
òðàíøåè.
Òàáëèöà 11
|
¹ ñå÷åíèé
|
Ïëîùàäü
ñå÷åíèÿ, ì².
|
Ðàññòîÿíèÿ
ìåæäó ñå÷åíèÿìè,
ì.
|
Îáú¸ì
ã/ì ìåæäó ñå÷åíèÿìè,
ì³
|
|
1
|
|
|
|
|
1
|
0
|
|
|
|
2
|
66,92
|
30
|
751
|
|
3
|
132,2
|
9,15
|
453
|
|
4
|
251,8
|
9,15
|
1756,8
|
|
5
|
281,46
|
11,7
|
3119,6
|
|
6
|
454
|
30
|
11032,35
|
|
7
|
328,16
|
30
|
11732,8
|
|
8
|
30
|
8692,8
|
|
9
|
356,8
|
18
|
9122,4
|
|
10
|
161,91
|
|
2985,3
|
|
11
|
90,42
|
|
|
|
12
|
123,70
|
|
|
V =
49898,85 ì
. Îáú¸ì ïî÷âåííîãî
ñëîÿ îïðåäåëÿåòñÿ
ïî âåðòèêàëüíûì
ðàçðåçàì ñ ó÷¸òîì
åãî ìîùíîñòè
- 0,8ì îò çåìíîé ïîâåðõíîñòè:
ï = Vñë ×
Ê, ãäå
ñë - îáú¸ì ñëîÿ
ïî êàæäîìó èíòåðâàëó,
Ê - êîýôôèöèåíò
ðàçðûõëåíèÿ,
(1,3).
Âåäîìîñòü ðàñ÷¸òà
îáú¸ìà ïî÷âåííîãî
ãðóíòà.
Òàáëèöà 12
|
¹ ñå÷åíèé
|
Ïëîùàäü
ñå÷åíèÿ, ì².
|
Ðàññòîÿíèÿ
ìåæäó ñå÷åíèÿìè,
ì.
|
Îáú¸ì
ã/ì ìåæäó ñå÷åíèÿìè,
ì³
|
|
1
|
|
|
|
|
1
|
0
|
|
|
|
2
|
12,16
|
30
|
189,7
|
|
3
|
18,40
|
9,15
|
145,4
|
|
4
|
22,3
|
9,15
|
193,6
|
|
5
|
28,2
|
11,7
|
306,7
|
|
6
|
33,6
|
30
|
964,08
|
|
7
|
27,16
|
30
|
947,8
|
|
8
|
26,4
|
30
|
835,5
|
|
9
|
26,8
|
18
|
829,9
|
|
10
|
14,10
|
|
2761
|
|
11
|
10,80
|
|
|
|
12
|
12,08
|
|
|
Òîãäà: V ï = 4688,8 ì³.
13. Îïðåäåëÿåòñÿ
öåíòð (òî÷êà D) îòâàëà.
Ôîðìà îòâàëà
ïðèíèìàåòñÿ
â âèäå óñå÷¸ííîãî
êîíóñà ñ ïëîùàäüþ
îñíîâàíèÿ, âû÷èñëåííîé
ïî ôîðìóëå:îñí
= 3188,4 ì²,
ãäå Í - âûñîòà
îòâàëà (2,5 ì).
îñí íèæí = √Sîñí/ ∏= 17,9 ì.
îñí âåðõ = 1594,2 ì².
îñí âåðõ = √Sîñí
âåðõ/ ∏= 12,7ì.
Ïî ðàññ÷èòàííûì
ïàðàìåòðàì ñòðîèòñÿ
êîíòóð îòâàëà
íà ïëàíå.
. Ïðè ïðîåêòèðîâàíèè
òðàññû àâòîìîáèëüíîé
äîðîãè îò òî÷êè
À äî îòâàëà íåîáõîäèìî
ó÷èòûâàòü ñå÷åíèå
ðåëüåôà è äîïóñòèìûé
óêëîí àâòîäîðîãè.
 íàøåì ñëó÷àå
óêëîí àâòîäîðîãè
i= 0,064, ñå÷åíèå
ðåëüåôà íà ïëàíå
- h= 2,0 ì. îïðåäåëÿåì
çàëîæåíèå - d = h/i = 2/0,064 = 31,2
ì.
Ðàñòâîðîì öèðêóëÿ
ðàâíûì d îòêëàäûâàåì
îñü àâòîäîðîãè
íà ïëàíå, âûáèðàÿ
ïî ãîðèçîíòàëÿì,
íàèáîëåå êîðîòêèé
è óäîáíûé ïóòü.
Íàíîñèì òðàññó
àâòîäîðîãè íà
ïëàí ìåñòíîñòè.
Ê ïîÿñíèòåëüíîé
çàïèñêå ïðîåêòà
ïðèëàãàþòñÿ âñå
íåîáõîäèìûå
ãðàôè÷åñêèå
ìàòåðèàëû:
· ïëàí ïîâåðõíîñòè
â ìàñøòàáå 1:1000 ñ
íàíåñ¸ííûìè
ãðàíèöàìè òðàíøåè,
îòâàëà ïî÷âåííîãî
ñëîÿ è àâòîìîáèëüíîé
äîðîãè,
· ïðîäîëüíûé
ïðîôèëü ïî îñè
òðàíøåè, ãîðèçîíòàëüíûé
ìàñøòàá 1:1000, âåðòèêàëüíûé,
· ïîïåðå÷íûå
ñå÷åíèÿ òðàíøåè
ïî âñåì ïèêåòàì
ñ óêàçàíèåì
ïëîùàäåé ñå÷åíèÿ
è ïî÷âåííîãî
ñëîÿ.

4. Ìàðêøåéäåðñêèå
ðàáîòû ïðè ïðîâåäåíèè
áóðîâçðûâíûõ
ðàáîò
Ïðè ðàçðàáîòêå
ìåñòîðîæäåíèé
ïîëåçíûõ èñêîïàåìûõ
îòêðûòûì ñïîñîáîì
îòäåëåíèå îò
ìàññèâà è äðîáëåíèå
ñêàëüíûõ è ïîëóñêàëüíûõ
ïîðîä, ðóäíûõ òåë
îñóùåñòâëÿþò
ìàññîâûìè âçðûâàìè
ñ ïîìåùåíèåì
çàðÿäîâ âçðûâ÷àòûõ
âåùåñòâ â ïðåäâàðèòåëüíî
ïðîáóðåííûå ñêâàæèíû.
Ñêâàæèíû ðàñïîëàãàþòñÿ
ñåðèÿìè íà âåðõíåé
ïëîùàäêå óñòóïà
â 1-2 è áîëåå ðÿäîâ.
Áóðîâçðûâíûå
ðàáîòû äîëæíû
îáåñïå÷èòü:
· çàäàííóþ
ñòåïåíü äðîáëåíèÿ
ãîðíûõ ïîðîä äëÿ
ïîñëåäóþùåé ïîãðóçêè
å¸ â òðàíñïîðòíûå
ñðåäñòâà è òðàíñïîðòèðîâêó,
· òðåáóåìûå
êà÷åñòâî è ñîðòíîñòü
âçîðâàííîãî
ðóäíîãî òåëà,
äîñòèæåíèå â
íåîáõîäèìûõ
ñëó÷àÿõ èçáèðàòåëüíîãî
äðîáëåíèÿ ïîðîä
ðàçëè÷íîé êðåïîñòè,
· ïðîåêòíûé
êîíòóð è óãîë
îòêîñà óñòóïà,
áåçîïàñíîñòü
áóðåíèÿ è çàðÿæàíèÿ
ñêâàæèí,
· çàäàííûå ðàçìåðû
è ôîðìó ðàçâàëà
âçîðâàííûõ ïîðîä,
óäîáíûå äëÿ èõ
ýêñêàâàöèè,
· ìèíèìàëüíûå
îòêëîíåíèÿ îò
ïðîåêòíûõ âûñîòíûõ
ïëîùàäîê óñòóïîâ,
èõ ðàçìåðîâ è
ôîðìû ïîâåðõíîñòè,
· ìèíèìàëüíîå
ñåéñìè÷åñêîå
âîçäåéñòâèå
âçðûâà íà ïîðîäíûé
ìàññèâ âáëèçè
êîíå÷íûõ êîíòóðîâ
êàðüåðà è îêðóæàþùèõ
èíæåíåðíûõ ñîîðóæåíèé,
· âûñîêèå ïîêàçàòåëè
ýêîíîìè÷íîñòè,
ïðîèçâîäèòåëüíîñòè
è áåçîïàñíîñòè
ãîðíûõ ðàáîò,
Ìàðêøåéäåðñêèå
ðàáîòû äî è ïîñëå
âçðûâà âêëþ÷àþò
â ñåáÿ:
· ñîñòàâëåíèå
êðóïíîìàñøòàáíîãî
ïëàíà ó÷àñòêà
âçðûâà, êîòîðûé
ñîñòàâëÿåòñÿ
ïî ðåçóëüòàòàì
äåòàëüíîé ìàðêøåéäåðñêî-ãåîëîãè÷åñêîé
ñú¸ìêè,
· ñîñòàâëåíèå
ïðîåêòà áóðîâçðûâíûõ
ðàáîò ñ óêàçàíèåì
ðàñïîëîæåíèÿ
âçðûâíûõ ñêâàæèí,
èõ ãëóáèí, ïåðåáóðà
è ËÍÑ,
· ñîçäàíèå íà
ó÷àñòêå ðàáîò
ñú¸ìî÷íîãî îáîñíîâàíèÿ
äëÿ ïåðåíåñåíèÿ
ïðîåêòíîãî ïîëîæåíèÿ
ñêâàæèí â íàòóðó
è ïîñëåäóþùåé
ñú¸ìêè ôàêòè÷åñêîãî
ïîëîæåíèÿ ïðîáóðåííûõ
ñêâàæèí ñ òî÷íûì
îïðåäåëåíèåì
èõ ãëóáèí è ïåðåáóðîâ,
· îïðåäåëåíèå
ïîëîæåíèÿ ñêâàæèí
îòíîñèòåëüíî
âåðõíåé è íèæíåé
áðîâîê îòêîñà
óñòóïîâ,
· ïðîâåäåíèå
äåòàëüíîé ìàðêøåéäåðñêîé
ñú¸ìêè ðåçóëüòàòà
âçðûâàíèÿ ñ ñîñòàâëåíèåì
ãðàôè÷åñêîé
è îò÷¸òíîé äîêóìåíòàöèè
è çàêëþ÷åíèå
îá ýôôåêòèâíîñòè
âçðûâà.
Ðàçìåðû è ôîðìà
âçðûâàåìîãî
ó÷àñòêà, âûñîòà
è óãîë îòêîñà
óñòóïà, îáùèé
îáú¸ì è ñòåïåíü
äðîáëåíèÿ âçðûâîì
ãîðíûõ ïîðîä, ñåéñìè÷åñêîå
âîçäåéñòâèå
âçðûâà êàæäûé
ðàç çàäàþòñÿ
ïðîåêòîì. Íà êàæäûé
î÷åðåäíîé ìàññîâûé
âçðûâ ãëàâíûé
èíæåíåð êàðüåðà
âûäà¸ò çàäàíèå
ñ óêàçàíèåì
äëèíû, øèðèíû
è îáú¸ìà ó÷àñòêà
âçðûâà ñ ïðèëîæåíèåì
âûêîïèðîâêè èç
ìàðêøåéäåðñêîãî
ïëàíà.
4.1 Ñîñòàâëåíèå
ïëàíà-ïðîåêòà
íà áóðîâçðûâíûå
ðàáîòû
Äëÿ ñîñòàâëåíèÿ
ïëàíà-ïðîåêòà
(ïëàíà-çàäàíèÿ)
íà áóðîâçðûâíûå
ðàáîòû íåîáõîäèìî
â ìàñøòàáå 1:1000 ñîñòàâèòü
ïëàí ó÷àñòêà
êàðüåðà, â ðàéîíå
êîòîðîãî ïëàíèðóþòñÿ
áóðîâçðûâíûå
ðàáîòû. Íà ðèñ.
11 ïîêàçàí áëîê
¹3 ãîð.+265 ì, êîíòóð
êîòîðîãî çàøòðèõîâàí,
ïîäãîòàâëèâàåìûé
ê âçðûâó.
Èñõîäíûå
äàííûå:
1.Ïëàí ó÷àñòêà
êàðüåðà ìàñøòàáà1
:1000.
2.Êîîðäèíàòû ïóíêòà
IV ìàðêøåéäåðñêîãî
ñúåìî÷íîãî îáîñíîâàíèÿ,
êì:
Õ IV = 0,698, YIV =
0,308.
3. Êîîðäèíàòû
ïóíêòà îïîðíîé
ñåòè R1 â êì:
ÕR1 =
0,785 YR1 =
0,195
Òðåáóåòñÿ
âûïîëíèòü:
1.Íàíåñòè ïî êîîðäèíàòàì
ïóíêò ñúåìî÷íîé
ñåòè IV;
2.Îïðåäåëèòü ðàçáèâî÷íûå
ýëåìåíòû äëÿ âûíîñà
áóðîâçðûâíûõ
ñêâàæèí â íàòóðó;
3.Íàíåñòè
íà ïîâåðõíîñòü
áëîêà ¹3 ïðîåêòíóþ
ñåòêó áóðîâçðûâíûõ
ñêâàæèí;
4. Îïðåäåëèòü
ïðîåêòíóþ ãëóáèíó
ñêâàæèí è ëèíèþ
íàèìåíüøåãî
ñîïðîòèâëåíèÿ
äëÿ 1-ãî ðÿäà.
|
arctgα IV - R1 =
|
Y R1-Y IV
|
=
|
0,195 - 0,308
|
= 307°59"
|
|
X R1-X IV
|
|
0,785 - 0,698
|
|
Çíà÷åíèå
ðàçáèâî÷íûõ
ýëåìåíòîâ βi
è Li
|
Íîìåðà
ñêâàæèí
|
βi ãðàä., ìèí.
|
Li ì
|
Íîìåðà
ñêâàæèí
|
βi ãðàä., ìèí.
|
Li ì
|
Íîìåðà
ñêâàæèí
|
βi ãðàä., ìèí.
|
Li ì
|
|
1
|
83°
|
152
|
27
|
212°
|
131
|
53
|
208°
|
109
|
|
2
|
85°
|
144
|
28
|
217°
|
134
|
54
|
213°
|
113
|
|
3
|
87°
|
136
|
29
|
220°
|
138
|
55
|
219°
|
118
|
|
4
|
90°
|
129
|
30
|
78°
|
140
|
56
|
71°
|
129
|
|
5
|
95°
|
122
|
31
|
80°
|
130
|
57
|
73°
|
119
|
|
6
|
97°
|
114
|
32
|
83°
|
121
|
58
|
74°
|
110
|
|
7
|
102°
|
106
|
33
|
86°
|
113
|
59
|
78°
|
101
|
|
8
|
105°
|
101
|
34
|
88°
|
105
|
60
|
80°
|
92
|
|
9
|
109°
|
94
|
35
|
92°
|
97
|
61
|
84°
|
84
|
|
10
|
115°
|
90
|
36
|
95°
|
90
|
62
|
88°
|
75
|
|
11
|
121°
|
86
|
37
|
101°
|
84
|
63
|
93°
|
67
|
|
12
|
127°
|
83
|
38
|
106°
|
77
|
64
|
100°
|
60
|
|
13
|
137°
|
81
|
39
|
110°
|
72
|
65
|
108°
|
55
|
|
14
|
142°
|
80
|
40
|
119°
|
68
|
66
|
118°
|
49
|
|
15
|
150°
|
81
|
41
|
128°
|
64
|
67
|
130°
|
45
|
|
16
|
157°
|
83
|
42
|
135°
|
61
|
68
|
142°
|
43
|
|
17
|
165°
|
85
|
43
|
147°
|
61
|
69
|
156°
|
44
|
|
18
|
171°
|
88
|
44
|
155°
|
62
|
70
|
168°
|
48
|
|
19
|
176°
|
93
|
45
|
165°
|
66
|
71
|
185°
|
53
|
|
20
|
181°
|
98
|
46
|
172°
|
70
|
72
|
188°
|
59
|
|
21
|
186°
|
102
|
47
|
180°
|
75
|
73
|
192°
|
65
|
|
22
|
189°
|
108
|
48
|
184°
|
81
|
74
|
198°
|
73
|
|
23
|
194°
|
114
|
49
|
190°
|
88
|
75
|
201°
|
81
|
|
24
|
199°
|
117
|
50
|
194°
|
95
|
76
|
205°
|
88
|
|
25
|
204°
|
126
|
51
|
200°
|
99
|
77
|
210°
|
92
|
208°
|
126
|
52
|
205°
|
104
|
78
|
215°
|
100
|
Ïðîåêòíàÿ
ãëóáèíà ñêâàæèíà
hñ âû÷èñëÿåòñÿ
ïî ôîðìóëå
ãäå δ - óãîë íàêëîíà
ñêâàæèíû ê ãîðèçîíòó,
ãðàä.;
hv- âûñîòà óñòóïà,
ì;ó - âåëè÷èíà
ïåðåáóðà ñêâàæèí,
ì.
Çíà÷åíèå
óãëà δ îïðåäåëÿåòñÿ
ñ ó÷åòîì îòêîñà
óñòóïà. Âûñîòà
óñòóïà îïðåäåëÿåòñÿ
êàê ðàçíîñòü
ñðåäíåé âûñîòíîé
îòìåòêè âåðõíåé
áðîâêè (Zñð.â) è ñðåäíåé
âûñîòíîé îòìåòêè
íèæíåé áðîâêè
óñòóïà (Zñð.í)
ó = Zñð.â - Zñð.í
|
Zñð.â =
|
∑ïi-1 Ziâ
|
; Zñð.í=
|
∑ïi-1 Zií
|
|
ï
|
|
ï
|
ãäå: Ziâ , Zií -âûñîòíûå
îòìåòêè âåðõíåé
è íèæíåé áðîâêè
óñòóïîâ ñîîòâåòñòâåííî;
ï - êîëè÷åñòâî
îòìåòîê (ïèêåòîâ)
|
Zñð.â =
|
1927,9
|
=275,41 Zñð.í=
|
2118,9
|
=264,86
|
|
7
|
|
8
|
|
hó= 275,41-264,86 = 10,55ì
|
hñ =
|
1
|
(10,55 + 0,15)
|
=10,74
|
|
sin85
|
|
|
Âåëè÷èíà
ïåðåáóðà ñêâàæèíû
çàâèñèò îò åå
äèàìåòðà dñ è îïðåäåëÿåòñÿ
èç âûðàæåíèÿó
=15 · dñ . dñ =100ìì ló= 0,15ì
Îïðåäåëÿåòñÿ
ìèíèìàëüíî äîïóñòèìîå
çíà÷åíèå ëèíèè
ñîïðîòèâëåíèÿ
ïî ïîäîøâå W èç
âûðàæåíèÿ
ãäå: ñ - êîýôôèöèåíò,
çàâèñÿùèé îò
ñòåïåíè äðîáëåíèÿ
ïîðîäû âçðûâîì;
p - âìåñòèìîñòü
1ì
ñêâàæèíû,
êã; q - óäåëüíûé
ðàñõîä ÂÂ, êã/äì3
q = 15 êã/äì3
Çíà÷åíèå
ñ =0,74
Âåëè÷èíà ð = 7,85
· qñ · Δ
ãäå: Δ- ïëîòíîñòü
çàðÿæàíèÿ ÂÂ
Δ
= 0,9 êã/äì3
|
W= √
|
0,74 · 7,85 · 100
· 0,9
|
= 5,9
|
|
15
|
|
Ñõåìà
ó÷àñòêà ìàñøòàá
1:1000

Ñïèñîê èñïîëüçóåìîé
ëèòåðàòóðû
1. Èíñòðóêöèÿ
ïî ïðîèçâîäñòâó
ìàðêøåéäåðñêèõ
ðàáîò. Ñåðèÿ 07. Íîðìàòèâíûå
äîêóìåíòû ïî
âîïðîñàì îõðàíû
íåäð ãåîëîãî-ìàðêøåéäåðñêîãî
êîíòðîëÿ. Âûïóñê
15. Îõðàíà íåäð è
ãåîëîãî-ìàðêøåéäåðñêèé
êîíòðîëü. Ì., 2003. 118ñ.
. Ìàðêøåéäåðñêèå
îïîðíûå è ñú¸ìî÷íûå
ñåòè íà êàðüåðàõ:
Ó÷åáíîå ïîñîáèå/
- Ãîëóáêî Á.Ï., Ïàíæèí
À.À. - Åêàòåðèíáóðã:
ÓÃÃÃÀ, 1999. - 55ñ.
. Ìàðêøåéäåðñêèå
ðàáîòû ïðè ðàçðàáîòêå
ìåñòîðîæäåíèé
îòêðûòûì ñïîñîáîì:
Ó÷åáíîé ïîñîáèå/
- Ãîëóáêî Á.Ï., Ïàíæèí
À.À. - Åêàòåðèíáóðã:
ÓÃÃÓ, 2005 - 154ñ.
. Ìàðêøåéäåðñêèå
ðàáîòû ïðè ðàçðàáîòêå
ìåñòîðîæäåíèé
ïîëåçíûõ èñêîïàåìûõ
îòêðûòûì ñïîñîáîì:
Ìåòîäè÷åñêèå
óêàçàíèÿ/ - Ãîëóáêî
Á.Ï. - Åêàòåðèíáóðã:
ÓÃÃÓ, 2004 - 38ñ.
. Ìàðêøåéäåðñêîå
äåëî: Ó÷åáíèê
äëÿ âóçîâ /Îãëîáëèí
Ë.Í., Ãåðàñèìîâè÷
Ã.È., Àêèìîâ À.Ã.
è äð. 2-å èçä., ïåðåðàá.
È äîï. Ì: Íåäðà,
1981 - 704ñ.
Ðàçìåùåíî
íà Allbest.ru