|
Варіант
|
Місткість
ПЗП, Кбайт
|
Місткість
ОЗП, Кбайт
|
Кількість
ПІ/Т; режим обміну
|
Кількість
ПАП/П
|
|
16
|
6
|
16
|
1; x1,
AB
|
2
|
|
ПЗП -
постійний запам’ятовувальний пристрій ОЗП - оперативний запам’ятовувальний
пристрій ПІ/Т - паралельний інтерфейс/таймер ПАП/П - подвоєний асинхронний
приймач / передавач Режими обміну через ПІ/Т: 0 (підрежими 00,01,1X); 1 (X0,
X1); 2; 3 Напрямок передавання даних через порти А та В позначено: введення -
відповідно A¯,
B¯; виведення - A, B. Наприклад, запис 00, A¯ B означає підрежим 00 режиму
обміну 0: через порт А вводяться дані, через В-виводяться; запис 2, A¯ означає введення через порт А в
режимі 2.
|
Розроблянню підлягають блок МП, блок ОП, блоки
ПІ/Т та ПАП/П, контролер шини та загальна логічна структура МПС.
Має бути складено фрагмент програми ініціювання
ПІ/Т на заданий режим обміну даними. Курсова робота розглядається як аванпроект
до подальшого технічного розроблення МПС. На цьому етапі не враховуються деякі
параметри, зокрема часові та навантажувальні.
1. Структурна схема МПС
Структурна схема будь-якого цифрового пристрою
(системи) зображується у вигляді прямокутників - закінчених функційних
модулів-блоків, поєднаних поміж собою спрямованими лініями основних сигналів
[1].
Структурна схема МПС М68000 (рис. 4.1) має
тришинну організацію і включає блок процесора (мікропроцесор МС68000 та
генератор тактових імпульсів ГТІ), шину адреси ША (А23…А1),
шину даних ШД (D15…D0), шину керування ШК
(кількість ліній шини керування визначається після конфігурування логічної
структури МПС), основну пам’ять ОП, інтерфейс та модулі введення / виведення зі
схемами доступу та контролер шини КШ.
МПС розраховано на програмний обмін даними із
зовнішніми пристроями (ЗП), який зорганізовується за допомогою периферійних
пристроїв (ПП) - модулів спряження МС68230 (програмований паралельний
інтерфейс/таймер ПІ/Т) та МС68681 (програмований подвоєний універсальний
асинхронний приймач / передавач ПАП/П); кількість таких модулів визначається
варіантом завдання. ША, ШД та ШК, до яких підмикається ПП, утворюють системну
шину (СШ) МПС. Інтерфейс МП з СШ загалом зорганізовується за допомогою одно-,
двонаправлених шинних формувачів (ШФ) та схем на логічних елементах (ЛЕ).
Головне призначення такого інтерфейсу - узгодження навантажувальної здатності
відповідних виходів МП зі споживаною потужністю входів СШ. За допомогою
спеціальних логічних схем поміж СШ та ОП, ПІ/Т, ПАП/П зорганізовується інтерфейс
доступу й читання даних. За допомогою контролера шини (КШ) здійснюється
блокування помилкового адресового звернення шляхом апаратного переривання
виконання поточної програми. Генератор тактових імпульсів формує одну чи дві
послідовності тактових (синхронізувальних) імпульсів, використовуваних для
синхронізування МП та інших пристроїв МПС.
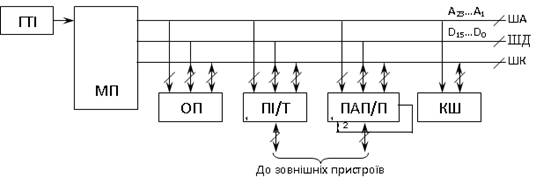
Рисунок 2.1 - Структурна схема МПС
2. Розроблення логічної структури МПС
2.1 Блок мiкропроцесора
До цього блока входять МП МС68000 (CPU),
генератор тактових імпульсів (GN) та допоміжні ланцюжки.
МП МС68000 [2] взаємодіє під час обміну даними з
ОП й периферійними пристроями через СШ, до якої вони підмикаються і яка складається
з 23-бітової шини адреси (ША), 16-бітової шини даних (ШД) та шини керування
(ШК). Кількість задіяних ліній ШК залежить від структури МПС. Адреса,
передавана ША, забезпечує вибір певного модуля й доступ у ньому до певної КП чи
регістра ПП, з яких за допомогою певних керувальних сигналів здійснюється
читання чи в які записуються дані через ШД. Виводи Vcc та GND (рис. 5.1)
слугують для підмикання джерела живлення напругою +5 В.
На виводах А23…А1 діють коди, які
забезпечують словарне адресування. При цьому передавання слова чи певного байта
по ШД визначається відповідними комбінаціями значень керувальних сигналів  та
та  .
.
Через виводи D15…D0
здійснюється передавання команд та даних. Інші виводи призначено для
передавання керувальних сигналів, які функційно поділяються на декілька груп.
Якщо активний стан сигналу задається низьким рівнем, то над його позначенням є
риска, інакше - без риски.
Системні сигнали. CLK - тактовий сигнал синхронізації,
період якого визначає тривалість такту машинного циклу. CLK узгоджує в часі
функціонування вузлів та блоків МП і супроводжує обмін у МПС.  - сигнал скидання.
- сигнал скидання.
Зовнішній сигнал системного скиду = 0 викликає системне переривання
виконання поточної програми. Відтак вміст регістрів адрес та даних набуває
нульового значення. У регістрі ознак SR установлюється значення прапорця S = 1
(режим супервізора), а інші прапорці набувають значення 0. Із КП з адресою $000
здійснюється завантаження початкового значення покажчика SSR супервізора, а з
КП з адресою $004 - вмісту РС - початкової адреси програми, яка виконує
завантаження певних початкових значень вмісту SR, регістрів адрес та даних, а
також завантаження (ініціалізування) регістрів інших пристроїв. Зовнішній
сигнал зазвичай формується під час ввімкнення
живлення чи натискання клавіші SB у схемі скидання, умовно зображеної на рис.
3.1..1. Сигнал = 0 формується також при виконанні
привілейованої команди RESET, яка переводить до початкового стану інші пристрої
МПС. Вхідний сигнал  = 0 зупиняє (зупин) виконання поточної
програми, переводить виводи А23…А1, D15…D0
до високоімпедансного стану (третій стан), а виходи керувальних сигналів - до
неактивного стану. З аналогічною реакцією МП формує вихідний сигнал = 0 наразі подвійної помилки шини
(дворазове поспіль надходження сигналу
= 0 зупиняє (зупин) виконання поточної
програми, переводить виводи А23…А1, D15…D0
до високоімпедансного стану (третій стан), а виходи керувальних сигналів - до
неактивного стану. З аналогічною реакцією МП формує вихідний сигнал = 0 наразі подвійної помилки шини
(дворазове поспіль надходження сигналу  = 0), вихід із стану зупинки відбувається при надходженні
зовнішнього сигналу = 0 або переривання.
= 0), вихід із стану зупинки відбувається при надходженні
зовнішнього сигналу = 0 або переривання.
Сигнал помилки звертання до шини = 0 формується контролером шини, який
виявляє помилки звернення за адресами неприєднаних модулів ОП чи периферійних
пристроїв, а також за тривалої відсутності сигналу готовності до обміну  = 0 від ПП чи ОП тощо.
= 0 від ПП чи ОП тощо.
Сигнали керування обміном.  - адресовий строб, який своїм активним рівнем = 0 у тактах S0 та S1
в циклі обміну супроводжує адресу на ША (рис. 3.1.2).
- адресовий строб, який своїм активним рівнем = 0 у тактах S0 та S1
в циклі обміну супроводжує адресу на ША (рис. 3.1.2).  - сигнал, що визначає напрям обміну по
ШД: уведення до МП (читання) - за = 1; виведення з МП (запис), якщо = 0. (передавання старшого байта),
- сигнал, що визначає напрям обміну по
ШД: уведення до МП (читання) - за = 1; виведення з МП (запис), якщо = 0. (передавання старшого байта),  (передавання молодшого байта) - сигнали,
які визначають довжину даних на ШД. Рівні = 0, = 0 визначають передавання слова.
Молодший байт передається, якщо = 1 та = 0, старший - = 0, = 1. Вхідний сигнал готовності до обміну = 0 надходить, якщо периферійний пристрій
чи пам’ять - об’єкти звертання - є готові до обміну. Інакше - = 1.
(передавання молодшого байта) - сигнали,
які визначають довжину даних на ШД. Рівні = 0, = 0 визначають передавання слова.
Молодший байт передається, якщо = 1 та = 0, старший - = 0, = 1. Вхідний сигнал готовності до обміну = 0 надходить, якщо периферійний пристрій
чи пам’ять - об’єкти звертання - є готові до обміну. Інакше - = 1.
Сигнали керування захоплюванням шини. Ці сигнали визначають
порядок використання системної шини (надалі шини) пристроями системи. У режимі
захоплювання шини МП від’єднується від шини, а керування обміном здійснює інший
пристрій. Найчастіше - це режим прямого доступу до пам’яті (ПДП), коли здійснюється
обмін між основною пам’яттю (ОП) та яким-небудь зовнішнім пристроєм великими
обсягами даних без участі МП.  - вхідний сигнал запиту від зовнішнього пристрою на захоплювання
шини. Якщо = 0, МП завершує поточний цикл обміну,
призупиняє виконання команди й переводить виводи А23…А1,
D15…D0 до високоімпедансного стану, а виходи
керувальних сигналів - до неактивного стану.
- вхідний сигнал запиту від зовнішнього пристрою на захоплювання
шини. Якщо = 0, МП завершує поточний цикл обміну,
призупиняє виконання команди й переводить виводи А23…А1,
D15…D0 до високоімпедансного стану, а виходи
керувальних сигналів - до неактивного стану.  - вихідний сигнал дозволу захоплювання шини, котрий набуває
значення = 0 після роз’єднання МП з шиною.
- вихідний сигнал дозволу захоплювання шини, котрий набуває
значення = 0 після роз’єднання МП з шиною.  - вхідний сигнал потвердження захоплювання
шини. Після отримання = 0 пристрій, який запитав дозволу на
захоплювання шини, надсилає до МП сигнали = 0, скасовує запит на захоплювання ( = 1) й переходить до керування шиною.
Після завершення обміну вказаний пристрій надсилає сигнал = 1. Відтак МП переходить до виконання
перерваної команди.
- вхідний сигнал потвердження захоплювання
шини. Після отримання = 0 пристрій, який запитав дозволу на
захоплювання шини, надсилає до МП сигнали = 0, скасовує запит на захоплювання ( = 1) й переходить до керування шиною.
Після завершення обміну вказаний пристрій надсилає сигнал = 1. Відтак МП переходить до виконання
перерваної команди.
Сигнали керування обміном з повільнодіючими ПП. Вихідний
сигнал Е - тактувальний сигнал для ПП, частота якого є вдесятеро менша за
частоту сигналу СLK. На вхідний сигнал від ПП готовності до обміну  = 0 МП встановлює сигнал
= 0 МП встановлює сигнал  = 0, відтак відбувається пересилання
даних зі збільшеним часом введення чи виведення. Адреси А23…А1
й сигнали та формуються як і за звичайного програмного обміну. Мінімальна
тривалість циклу обміну становить десять тактів.
= 0, відтак відбувається пересилання
даних зі збільшеним часом введення чи виведення. Адреси А23…А1
й сигнали та формуються як і за звичайного програмного обміну. Мінімальна
тривалість циклу обміну становить десять тактів.
Вихідні сигнали FC2…FC0. Трирозрядний
код FC2…FC0 визначає тип виконуваного циклу. Відповідні
комбінації бітів указаного коду використовуються для розподілу банків даних між
супервізором та користувачем, формування сигналу потвердження переривання  , а також дозволяють ідентифікувати
поточний стан МП у перебігу настроювання МПС.
, а також дозволяють ідентифікувати
поточний стан МП у перебігу настроювання МПС.
Вхідні сигнали IPL2…IPL0.
Трирозрядний код IPL2…IPL0, який надходить від
пріоритетного шифратора, визначає певну підпрограму обслуговування запиту на
переривання. Код 111 означає відсутність запиту на переривання.
Режим обміну визначає, які виводи керувальних сигналів
залишаються незадіяними. Щоб захистити МП від завад, на таких вхідних виводах в
цьому разі мають постійно діяти неактивні логічні рівні.
На рис. 3.1.1 всі незадіяні входи - інверсні, тому на них
умовно показано подавання неактивного високого рівня через резистори R від
джерела живлення +5 В. Генератор тактових імпульсів GN формує послідовності
тактових імпульсів для МП та ПП.
2.2 Блок основної пам’яті
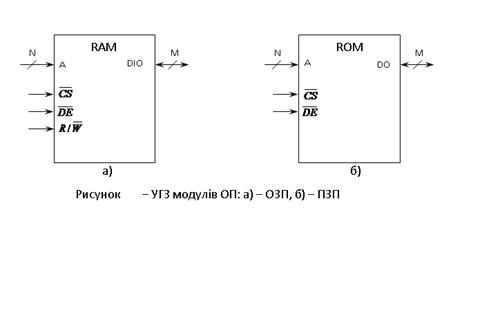
Для побудови блока ОП використовуються стандартні модулі ПЗП та
ОЗП. При зображенні схеми блока ОП доцільно застосовувати умовно-графічне
зображення (УГЗ) вказаних модулів, як подано на рис. 3.2.1
На рис. 3.2.1: A - N-розрядний адресовий вхід; DIO -
об’єднаний
М-розрядний вхід-вихід даних;  - вхід сигналу «вибір модуля»;
- вхід сигналу «вибір модуля»;  - вхід сигналу «ввімкнення модуля»; - вхід сигналу «читання / запис»; DO -
М-розрядний вихід даних. В схемі блока ОП N та М подаються відповідними
позначеннями бітів адреси й даних, які діють на виводах А, DIO та DO.
- вхід сигналу «ввімкнення модуля»; - вхід сигналу «читання / запис»; DO -
М-розрядний вихід даних. В схемі блока ОП N та М подаються відповідними
позначеннями бітів адреси й даних, які діють на виводах А, DIO та DO.
Кількість сегментів ОП бажано мати мінімальною за їхньої
однакової місткості. Кожний сегмент має складатись з двох однакових банків-модулів,
місткість яких рекомендовано визначати як 2n Кбайт
(n = 1, 2, 3, 4, 5, 6).
Розглянемо конкретний приклад побудови блока ОП. На рис.
5.4 зображено схему блока ОП, яка складається з двох двобанкових сегментів ПЗП
та ОЗП місткістю 32 Кбайт кожний, комірки пам’яті яких адресовано бітами А14…А1.
Вибір (адресове звертання) певного сегмента здійснюється за допомогою
дешифратора DC1. Інформаційні входи DC1 відповідно сполучено з лініями ША, на
яких діє група бітів N4 (А16 А15).
Розрядність коду N4 визначається загальною кількістю
сегментів (включно із сегментом ПП). На вхід  подається з МП керувальний сигнал , який активізується у тактах S1…S3 циклів
читання та записування. Два виходи DC1 (DC0, DC1)
сполучено зі входами модулів банків відповідних сегментів ОП.
Активний рівень з виходу DC12 призначено для вибору сегмента ПП.
Активні рівні з інших незадіяних виходів DC1 блокуються КШ. У розглядуваному
прикладі блокується дія активного рівня з виходу DC13.
подається з МП керувальний сигнал , який активізується у тактах S1…S3 циклів
читання та записування. Два виходи DC1 (DC0, DC1)
сполучено зі входами модулів банків відповідних сегментів ОП.
Активний рівень з виходу DC12 призначено для вибору сегмента ПП.
Активні рівні з інших незадіяних виходів DC1 блокуються КШ. У розглядуваному
прикладі блокується дія активного рівня з виходу DC13.
Активні рівні з виходів DC10 та DC11
використовуються також як сигнали готовності до обміну відповідних сегментів
ОП.
Виводи А модулів усіх сегментів ОП сполучено з відповідними
лініями ША (А14…А1 у розглядуваному прикладі). Виводи DO
та DIO модулів ПЗП та ОЗП молодшого банку відповідно сполучені з лініями D7…D0
ШД, а старшого банку - з лініями D14…D8.
Загалом для будь-якої кількості сегментів ПЗП входи модулів молодшого банку ПЗП сполучуються з
виходом L RОM схеми ввімкнення банків (СВБ), а входи
модулів старшого банку ПЗП сполучуються з
виходом HRОM СВБ. Активні рівні на зазначених
входах ініціюють стан «читання» з відповідних банків ПЗП. Аналогічно сполучено
входи банків ОЗП з виходами LRAM та HRAM СВБ. В цьому разі активні рівні на зазначених входах ініціюють
увімкнення відповідних банків ОЗП. Входи усіх модулів ОЗП сполучено з виходом СВБ. Функціонування СВБ пояснює таблиця
перемикань 5.1, в якій H = 0 - сигнал увімкнення старшого банку
даних ОЗП чи ввімкнення (читання) старшого банку ПЗП; L= 0 - сигнал увімкнення молодшого банку
ОЗП чи ввімкнення (читання) молодшого банку ПЗП.
Таблиця 3.2.1 - Таблиця перемикань СВБ
|
   ПЗПОЗП ПЗПОЗП
|
|
|
|
|
|
|
|
|
 
|
|
|
|
|
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
|
2
|
0
|
1
|
0
|
1
|
1
|
0
|
1
|
0
|
|
3
|
0
|
1
|
1
|
0
|
1
|
0
|
1
|
1
|
|
4
|
1
|
0
|
0
|
1
|
1
|
1
|
0
|
0
|
|
5
|
1
|
0
|
1
|
1
|
0
|
1
|
0
|
1
|
|
6, 7
|
1
|
1
|
X
|
1
|
1
|
1
|
1
|
X
|
2.3 Блоки периферійних пристроїв
Згідно з варіантами завдань до КР кількість ПП - 2…4. Вибір того
чи того ПП здійснюється за допомогою коду групи бітів N2 адреси, який
декодується дешифратором DC2. DC2 повинен мати вхід увімкнення ( ), який сполучується з
відповідним виходом DC1. Інверсні виходи DC2 відповідно сполучуються зі
входами
), який сполучується з
відповідним виходом DC1. Інверсні виходи DC2 відповідно сполучуються зі
входами  (вибір модуля) ПП.
Сигнали з незадіяних виходів мають надходити до КШ, який блокує неправильне
звертання до ПП.
(вибір модуля) ПП.
Сигнали з незадіяних виходів мають надходити до КШ, який блокує неправильне
звертання до ПП.
Адресове звертання до трьох ПП визначається групою N2 бітів A7A6:
00, 01, 10 (A7A6 = 11 - неправильне звернення). У разі
чотирьох ПП будуть задіяні всі виході DC2 для вибору певних.
Керувальні сигнали  ,
,  надходять з відповідних виходів МП
МС68000, CLK - з GN. Сигнал готовності до обміну надходить на відповідний вхід МП через ЛЕ
І, інші входи якого сполучуються з виводами
надходять з відповідних виходів МП
МС68000, CLK - з GN. Сигнал готовності до обміну надходить на відповідний вхід МП через ЛЕ
І, інші входи якого сполучуються з виводами  модулів інших ПП і виходами DC10 та DC11,
сигнали з яких є сигналами вибору сегментів ОП. Через виводи D7…D0,
які сполучуються з відповідними лініями ШД, здійснюється обмін даними з МП.
модулів інших ПП і виходами DC10 та DC11,
сигнали з яких є сигналами вибору сегментів ОП. Через виводи D7…D0,
які сполучуються з відповідними лініями ШД, здійснюється обмін даними з МП.
Виводи RS5…RS1 відповідно сполучуються з лініями А5…А1.
Зазначеними лініями ША передається код, який визначає певний регістр,
задіюваний за програмування МС68230 чи за обміну даними з МП.
Виводи Н4…Н1, залежно від режиму
обміну, використовуються в певних комбінаціях для передавання даних чи
керувальних сигналів.
Через виводи РА7…РА0 та РВ7…РВ0 (порти А та В) здійснюється
обмін даними із зовнішніми пристроями (ЗП) в паралельному форматі
Через виводи РС7…РС0 (порт С) здійснюється, залежно
від режиму обміну, або обмін даними в паралельному форматі із ЗП, або
передавання керувальних сигналів, які обслуговують таймер, супроводжують обмін
в режимах захоплювання шин та переривання. Користуючись вищенаведеним описом,
можна скласти схему блока ПІ/Т з більшої кількості ІМС МС68230.
Згідно з розглядуваним прикладом, складається з двох ІМС
МС68681 [4] з ланцюжками блокування входу сигналу потвердження переривання  від МП. Нижче описано призначення виводів
ІМС МС68681 та їхні сполучення з виводами МП та ША й ШД [4]
від МП. Нижче описано призначення виводів
ІМС МС68681 та їхні сполучення з виводами МП та ША й ШД [4]
Через виводи D7…D0 здійснюється
двоспрямований обмін даними з МП у паралельному форматі одноіменними лініями
ШД. На входи RS4…RS1, які сполучуються відповідно з лініями A4…A1 ША, надходить
від МП код вибору регістра ПАП/П, задіюваного при програмуванні МС68681 або при
обміні даними між МП та ПАП/П. Входи керувальних сигналів  ,
,  сполучуються з відповідними виводами МП, Х1/CLK - з GN, вивід X2
заземлюється. Вихід
сполучуються з відповідними виводами МП, Х1/CLK - з GN, вивід X2
заземлюється. Вихід  через ЛЕІ (див. рис. 3.3.1.1)
сполучується з відповідним входом МП. Вхід
через ЛЕІ (див. рис. 3.3.1.1)
сполучується з відповідним входом МП. Вхід  сполучується з відповідним виходом DC2. Вивід
сполучується з відповідним виходом DC2. Вивід  (запит переривання до МП) не задіюється в
режимі програмного обміну. Вхідний вивід
(запит переривання до МП) не задіюється в
режимі програмного обміну. Вхідний вивід  (потвердження переривання від МП) блокується. Через вивід T´DA або T´DB здійснюється передавання даних
до ЗП у послідовному форматі відповідно через канал А або В ПАП/П, через вивід
R´DA або R´DB - відповідно приймання даних.ІР5…ІР0
- виводи порту введення даних у паралельному форматі від ЗП. ОР7…ОР0
- виводи порту виведення даних до ЗП у паралельному форматі.
(потвердження переривання від МП) блокується. Через вивід T´DA або T´DB здійснюється передавання даних
до ЗП у послідовному форматі відповідно через канал А або В ПАП/П, через вивід
R´DA або R´DB - відповідно приймання даних.ІР5…ІР0
- виводи порту введення даних у паралельному форматі від ЗП. ОР7…ОР0
- виводи порту виведення даних до ЗП у паралельному форматі.
2.4 Контролер шини
Призначення КШ - формування активного рівня (логічного
нуля) на вході  МП у разі неправильного адресового
звертання.
МП у разі неправильного адресового
звертання.
На вході КШ надходять групи бітів N5, N3 та біт А5 з
ША, а також сигнал з незадіяного виходу DC2. Вихід КШ сполучується із входом  МП. При всіх адресових
звертаннях код N5 повинен мати певне фіксоване значення, а на незадіяному
виході DC2 мають діяти неактивні рівні. Фіксоване значення повинне мати код N3
при звертанні до ПП і біт А5 - при зверненні до ПАП/П.
МП. При всіх адресових
звертаннях код N5 повинен мати певне фіксоване значення, а на незадіяному
виході DC2 мають діяти неактивні рівні. Фіксоване значення повинне мати код N3
при звертанні до ПП і біт А5 - при зверненні до ПАП/П.
Якщо відсутні певні обмеження, доцільно, з точки зору простоти
логічної структури КШ, надати кодам N5, N3 та A5 нульового значення
при відповідних адресових звертаннях. Тоді для розглядуваного прикладу А5 = А23
+ … + A17 = 0 за будь-якого адресового звертання, A3 = A14
+ … + A8 = 0 при звертанні до ПП, А5 = 0 - при
звертанні до ПАП/П. Логіка функціонування КШ у цьому разі зумовлюється такими
станами його входів та виходу:=1,  = 0;
= 0;
DC23 = 0, = 0;
DC21 ^ DC22 = 0, A5 = 1, = 0.
3. Логічна структура (схема) МПС
Розроблені логічні структури (ЛС) окремих блоків об’єднуються у ЛС
МПС. Виводи сигналів адреси й даних окремих елементів та модулів відповідно
з’єднуються через стандартно зображені ША і ШД. Виводи керувальних сигналів доцільно
також відповідно сполучити через ШК з відповідним позначенням виводів від неї.
Позначення елементів схеми - згідно зі стандартними позначеннями елементів
цифрових пристроїв.
Таблиця 4.1
|
А 23
|
А 22
|
А 21
|
А 20
|
А 19
|
А 18
|
А 17
|
А 16
|
А 15
|
А 14
|
А 13
|
А 12
|
А 11
|
А 10
|
А 9
|
А 8
|
А 7
|
А 6
|
А 5
|
А 4
|
А 3
|
А 2
|
А 1
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
4. Програмування режимів ПІ/Т (МС68230)
Програмування режимів програмного обміну через порти А та В ІМС
МС68230 [3] складається з ініціалізування регістра керування режимом роботи
портів (PGCR), регістрів напрямку передавання даних через порти А(PADDR) та
B(PBDDR), регістрів керування підрежимами портів A(PACR) та B(PBCR).
Пересилання даних відбувається через регістр PADR (порт А) чи через регістр
PBDR (порт В). Зазначені регістри - восьмибітові. При звертанні до ПІ/Т адреси
названих регістрів визначають коди A5…A1 (табл. 7.1) та А0
= 1.
Порти А та В для двобуферизованого передавання мають ще додаткові
неадресовані регістри даних - відповідно PACDR та PBCDR, які дозволяють
зберігати інформацію, якщо необхідно ввести нові дані до того, як попередні
дані буде прочитано МП, або вивести наступні дані з МП до того, як попередні
буде виведено до ЗП. За такого передавання відбувається почергове защіпання
(записування) даних спочатку в одному регістрі даних, потім у другому, відтак -
виведення чи введення через порт.
Однобуферизоване передавання супроводжується защіпанням лише в
одному регістрі даних. Незащіпуване передавання - це передавання без фіксування
в регістрах даних.
Таблиця 5.1 - Коди A5…A1 адрес
регістрів МС68230
|
Коди A5…A1
(виводи RS5…RS1)
|
Позначення
регістра
|
Назва
регістра
|
|
0 0 0 0
0
|
PGCR
|
Регістр
керування режимом роботи портів
|
|
0 0 0 1
0
|
PADDR
|
Регістр
напрямку порту А
|
|
0 0 0 1
1
|
PBDDR
|
Регістр
напрямку порту В
|
|
0 0 1 1
0
|
PACR
|
Регістр
керування порту А
|
|
0 0 1 1
1
|
PBCR
|
Регістр
керування порту В
|
|
0 1 0 0
0
|
PADR
|
Регістр
даних порту А
|
|
0 1 0 0
1
|
PВDR
|
Регістр
даних порту В
|
Режим 0. Обидва порти - восьмибітні. Виводи портів може бути
настроєно на введення чи виведення побітно. Кожен порт може функціонувати в
трьох підрежимах:
двобуферизований вхід, однобуферизований вихід (00);
незащіпуваний вхід, двобуферизований вихід (01);
незащіпуваний вхід, однобуферизований вихід (1Х).
Коди ініціалізування регістра PGCR на певні режими обміну наведено
в табл. 5.2, регістрів PACR та PBCR - в табл. 5.3. Для ініціалізування
зазначених регістрів, а також введення / виведення даних використовуються
команди пересилання (див. приклад). Виконавчі адреси регістрів визначаються
залежно від конфігурації МПС та її характеристик.
Таблиця 5.2 - Коди ініціалізування PGCR (00000)
|
Б і т и
|
7
|
Режим
|
 (0) (0) (1) (1) (2) (2) (3) (3)
|
|
|
|
|
6
|
|
|
|
|
|
|
5
|
Дозвіл
(1) Н3, 4
|
1 (0;
1Х)
|
1
|
1
|
1
|
|
4
|
Дозвіл
(1) Н2, 1
|
1 (0;
1Х)
|
1
|
1
|
1
|
|
3
|
Активний
рівень Н4
|
1 (0)
|
1 (0)
|
1 (0)
|
|
2
|
Активний
рівень Н3
|
1 (0)
|
1 (0)
|
1 (0)
|
1 (0)
|
|
1
|
Активний
рівень Н2
|
1 (0)
|
1 (0)
|
1 (0)
|
1 (0)
|
|
0
|
Активний
рівень Н1
|
1 (0)
|
1 (0)
|
1 (0)
|
1 (0)
|
|
1 (0) -
чи 1, чи 0. (0; 1Х) - 0 у підрежимі 1Х.
|
Таблиця 5.3 - Коди ініціалізування PACR та PВCR
|
Регістр
|
PACR
|
PBCR
|
|
Біт
|
Режим
|
0
|
1
|
0
|
1
|
|
7
|
Підрежим
|
0
|
0
|
1
|
Х(0)
|
Х(0)
|
0
|
0
|
1
|
Х(0)
|
Х(0)
|
|
6
|
|
0
|
1
|
Х
|
0 (0)
|
1 (0)
|
0
|
1
|
Х
|
0 (0)
|
1 (0)
|
|
5
|
Керування
Н2 (Н4)*
|
1
|
1
|
0
|
0
|
1
|
1
|
1
|
0
|
1
|
1
|
|
4
|
|
1
|
1
|
Х
|
Х
|
1
|
1
|
1
|
Х
|
1
|
1
|
|
3
|
|
0
|
0
|
Х
|
Х
|
0
|
0
|
0
|
Х
|
0
|
0
|
|
2
|
Дозвіл
на переривання по Н2 (Н4)
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
1
|
Керування
Н1 (Н3)**
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
0
|
|
Х
|
1
|
Х
|
Х
|
Х
|
Х
|
1
|
Х
|
Х
|
Х
|
|
* Н2 -
для PACR та Н4 - для PВCR ** Н1 - для PACR та Н3 - для PВCR Х - невизначене
значення біта У дужках подано значення бітів 7 та 6 у відповідних підрежимах,
вказаних позначенням бітів до дужок.
|
Виконавчі адреси регістрів, які підлягають ініціалізуванню,
складаються з сукупності груп бітів N5N4N3N2N1A0. Для розглядуваного
прикладу A0 = 1 (передавання молодшого байта за ініціалізування
регістрів ПІ/Т); N1 складається з бітів А5…А1, які
визначаються з табл. 5.1; N2 складається з бітів А7А6
(три ПП) і визначає двійковий номер ПІ/Т - 00; N3 - з бітів А14…А8,
значення яких фіксується на рівні 0; N4 складається з бітів А16 А15
(три сегменти) й визначає номер сегмента ПП - 10; N5 складається з бітів А23…А17,
які мають фіксоване значення - 0.
У разі передавання 8-бітових даних виконавчі адреси регістрів PADR
та PBDR визначаються в аналогічний спосіб. При передаванні 16-бітових даних
адресою регістра даних об’єднаного порту А та В буде парна адреса (A0
= 0) регістра PBDR.
Визначені в такий спосіб виконавчі адреси регістрів ПІ/Т для
розглядуваного прикладу наведені в табл. 5.4.
Таблиця 5.4 - Виконавчі адреси регістрів ПІ/Т
|
Регистр
|
А 23
|
А 22
|
А 21
|
А 20
|
А 19
|
А 18
|
А 17
|
А 16
|
А 15
|
А 14
|
А 13
|
А 12
|
А 11
|
А 10
|
А 9
|
А 8
|
А 7
|
А 6
|
А 5
|
А 4
|
А 3
|
А 2
|
А 1
|
А 0
|
|
6
тетрада
|
5
тетрада
|
4
тетрада
|
3
тетрада
|
2
тетрада
|
1
тетрада
|
|
PGCR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
|
PACR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
1
|
0
|
0
|
|
PBCR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
1
|
1
|
0
|
|
PADDR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
1
|
1
|
0
|
0
|
|
PBDDR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
1
|
1
|
1
|
0
|
|
PADR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
|
PBDR
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
1
|
0
|
0
|
1
|
0
|
Послідовність команд програмного ініціалізування
регістра PGCR
MOVEQ #$7F, D1 // Завантаження регістра D1 кодом
ініціалізування 30.L #$0000C0, A1 // Завантаження регістра А1 адресою 0000C0
MOVE.B D1, (A1) // Пересилання коду
ініціалізування до регістра PGCR
Послідовність команд програмного ініціалізування
регістра PACR
MOVEQ #$30, D2 // Завантаження регістра D2 кодом
ініціалізування FF.L #$0000C4, A2 // Завантаження регістра А2 адресою
0000C4
MOVE.B D2, (A2) // Пересилання коду
ініціалізування до регістра PACR
Послідовність команд програмного ініціалізування
регістра PBCR
MOVEQ #$30, D3 // Завантаження регістра D3 кодом
ініціалізування 30.L #$0000C6, A3 // Завантаження регістра А3 адресою
0000C6
MOVE.B D3, (A3) // Пересилання коду
ініціалізування до регістра PBCR
Послідовність команд програмного ініціалізування
регістра PADDR
MOVEQ #$FF, D4 // Завантаження регістра D4 кодом ініціалізування
FF.L #$0000CC, A4 // Завантаження регістра А4 адресою 0000CC
MOVE.B D4, (A4) // Пересилання коду
ініціалізування до регістра PADDR
Послідовність команд програмного ініціалізування
регістра PBDDR
MOVEQ #$FF, D5 // Завантаження регістра D5 кодом
ініціалізування FF.L #$0000CE, A5 // Завантаження регістра А4 адресою
0000CE
MOVE.B D5, (A5) // Пересилання коду
ініціалізування до регістра PBDDR
Послідовність команд програмного ініціалізування
регістра PADR
MOVEQ #$FF, D6 // Завантаження регістра D6 кодом
ініціалізування FF.L #$0000D0, A6 // Завантаження регістра А4 адресою
0000D0
MOVE.B D6, (A6) // Пересилання коду
ініціалізування до регістра PADR
Послідовність команд програмного ініціалізування
регістра PBDR
MOVEQ #$FF, D7 // Завантаження регістра D7 кодом
ініціалізування FF.L #$0000D2, A7 // Завантаження регістра А4 адресою
0000D2
MOVE.B D7, (A7) // Пересилання коду
ініціалізування до регістра PBDR.
Список літератури
1 Проектирование микропроцессорной электронно-вычислительной
аппаратуры. Справочник / В.Г. Артюхов, А.А. Будняк, В.Ю. Лапий и др. - К.:
«Техника», 1988.
2 Шагурин И.И. Микропроцессоры и микроконтроллеры фирмы
Motorola - М.: Радио и связь, 1998.
MC68230. Parallel Interface / Timer (PI/T) /Advance
Information, Motorola INC, 1983.
MC68681. Dual Asynchronous Receiver / Transmitter (DUART)
/ Advance Information, Motorola INC, 1985.